Escuela De Educación Básica
MANUEL ABAD
PRIMER PARCIAL
TEMAS.
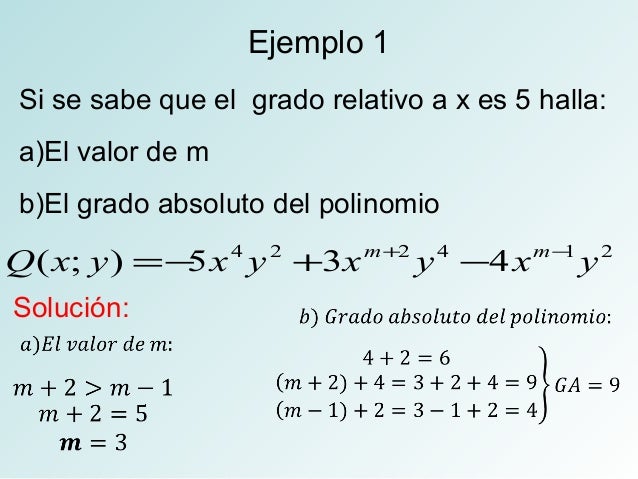
LOS GRADOS DE POLINOMIO :
En algebraica grados de un polinomio es el grado máximo de los exponentes de una variable de los monomios de los componen
grado tiene básicamente el mismo significado cuando se refiere a un polinomio
En esta página vamos a ver cómo multiplicar polinomios, por ejemplo, multiplicar los polinomios y :
Después, hablaremos sobre la relación que hay entre el grado del polinomio del resultado con el grado de los polinomios del producto. También, calcularemos las fórmulas de algunos productos notables, como el cuadrado y el cubo de un binomio. Para terminar, resolveremos 10 problemas de productos de polinomios.
Nota: la parte literal de los monomios con los que trabajaremos tienen sólo potencias de .
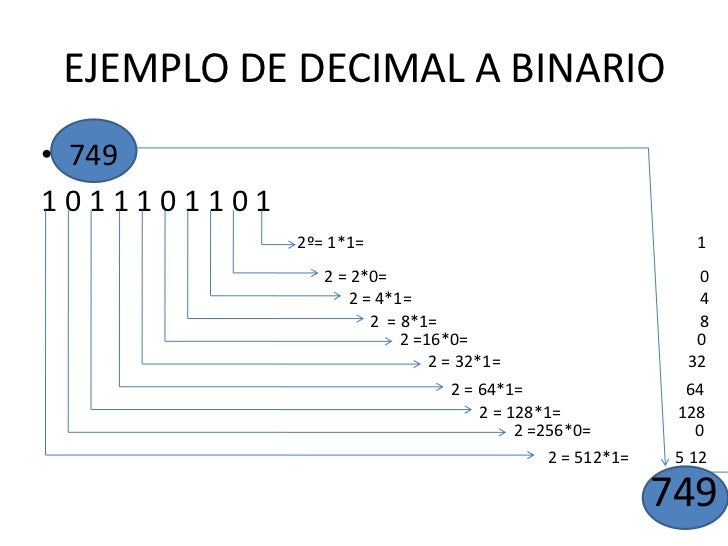
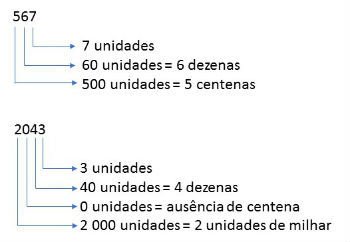
SISTEMA DE ENUMERACIÓN
Los sistemas de enumeración son conjuntos de principios convenios símbolos que se usan para expresar y comunicar cantidades
EJEMPLOS
TEOREMA DE RESIDUO
efinición: teorema del residuo. Teorema que establece que si un polinomio de x, f(x), se divide entre (x - a), donde a es cualquier número real o complejo, entonces el residuo es f(a). Como se muestra, la expresión anterior nos puede llevar fácilmente a esperar que 4 sea el residuo cuando f(x) se divide entre (x-2).
Si se divide la función polinomial ƒ(x) entre el binomio x - a donde a es un número real, el residuo es igual a ƒ(a).
El teorema del residuo indica que el resultado de evaluar numéricamente una función polinomial para un valor a es igual al residuo de dividir el polinomio entre x - a. Un ejemplo de esto se ilustra en la parte de arriba. Se recomienda que el lector realice otras comprobaciones. Una conclusión muy importante del teorema del residuo es se puede evaluar numéricamente una función polinomial usando la división sintética.
A partir de lo anterior, si ƒ(a) = 0, entonces x - a es un factor del polinomio porque el residuo es cero. Cuando se encuentra un valor de x para el cual ƒ(x) = 0 se ha encontrado una raiz del polinomio, en el supuesto anterior, a es una raiz del polinomio.
El Teorema del Residuo (en álgebra) se emplea para conocer el resíduo que se obtiene al dividir un polinomio por un binomio de la forma x-a (siendo "a" un valor numérico conocido) sin necesidad de efectuar la división.
Para ello basta sustituir el valor de a en el polinomio haciendo x=a
Ejemplo:
x³ + 2x² - 3x + 5 entre x - 2
En este caso, a=2 y por lo tanto sustituimos "a" en el polinomio:
(2)³ + 2(2)² - 3(2) + 5 = 8 + 8 - 6 + 5 = 15
El residuo es entonces 15.
El teorema del residuo indica que el resultado de evaluar numéricamente una función polinomial para un valor a es igual al residuo de dividir el polinomio entre x - a. Un ejemplo de esto se ilustra en la parte de arriba. Se recomienda que el lector realice otras comprobaciones. Una conclusión muy importante del teorema del residuo es se puede evaluar numéricamente una función polinomial usando la división sintética.
A partir de lo anterior, si ƒ(a) = 0, entonces x - a es un factor del polinomio porque el residuo es cero. Cuando se encuentra un valor de x para el cual ƒ(x) = 0 se ha encontrado una raiz del polinomio, en el supuesto anterior, a es una raiz del polinomio.
El Teorema del Residuo (en álgebra) se emplea para conocer el resíduo que se obtiene al dividir un polinomio por un binomio de la forma x-a (siendo "a" un valor numérico conocido) sin necesidad de efectuar la división.
Para ello basta sustituir el valor de a en el polinomio haciendo x=a
Ejemplo:
x³ + 2x² - 3x + 5 entre x - 2
En este caso, a=2 y por lo tanto sustituimos "a" en el polinomio:
(2)³ + 2(2)² - 3(2) + 5 = 8 + 8 - 6 + 5 = 15
El residuo es entonces 15.
Teorema del factor
Si a es una raiz de ƒ(x), entonces x - a es un factor del polinomio, donde a es un número real.
Aqui podemos observar la importancia de conocer el valor del residuo, ya que si éste es igual a cero, nos va a indicar que hemos encontrado un factor del polinomio y con él, una raiz del polinomio (una solución a la ecuación polinomial ƒ(x) = 0).
Si a es una raiz de ƒ(x), entonces x - a es un factor del polinomio, donde a es un número real.
Aqui podemos observar la importancia de conocer el valor del residuo, ya que si éste es igual a cero, nos va a indicar que hemos encontrado un factor del polinomio y con él, una raiz del polinomio (una solución a la ecuación polinomial ƒ(x) = 0).
Ejercicio
Comprueba que los siguientes polinomios tienen como factores los que se indican:
1.-(x3 − 5x − 1) tiene por factor (x − 3)
(x3 − 5x −1) es divisible por (x − 3) si y sólo si P(x = 3) = 0.
P(3) = 33 − 5 · 3 − 1 = 27 − 15 − 1 ≠ 0
(x − 3) no es un factor.
2.-(x6 − 1) tiene por factor (x + 1)
(x6 − 1) es divisible por (x + 1) si y sólo si P(x = − 1) = 0.
P(−1) = (−1)6 − 1 = 0
(x + 1) es un factor.
3.-(x4 − 2x3 + x2 + x − 1) tiene por factor (x − 1)
(x4 − 2x3 + x2 + x − 1) es divisible por (x − 1 ) si y sólo si P(x = 1) = 0.
P(1) = 14 − 2 · 13 + 1 2 + 1 − 1 = 1 − 2 + 1 + 1 − 1 = 0
(x − 1) es un factor.
4.-(x10 − 1024) tiene por factor (x + 2)
(x10 − 1024) es divisible por (x + 2) si y sólo si P(x = − 2) = 0.
P(−2) = (−2)10 − 1024 = 1024 − 1024 = 0
(x + 2) es un factor.
ECUACIONES
Las ecuaciones algebraicas de dos pasos son relativamente rápidas y sencillas; después de todo, solo deben tomar dos pasos. Para resolver una ecuación algebraica de dos pasos, todo lo que debes hacer es aislar la variable usando la adición, la sustracción, la multiplicación o la división. Si quieres saber cómo resolver ecuaciones algebraicas en una variedad de formas, solo sigue los pasos a continuación.

- Escribe el problema. El primer paso para resolver una ecuación algebraica de dos pasos es simplemente escribir el problema para que puedas visualizar la solución. Supongamos que tenemos el siguiente problema: -4x + 7 = 15.
-
2Decide si vas a usar la adición o sustracción para aislar el término de la variable. El siguiente paso es hallar una manera de dejar el "-4x" en un lado y mantener las constantes (números enteros) en el otro. Para hacerlo, deberás aplicar el "inverso aditivo" encontrando el opuesto de +7, que es -7. Sustrae 7 en ambos lados de la ecuación de modo que el "+7" en el lado del término de la variable se cancele. Solo escribe "-7" debajo del 7 en un lado y debajo del 15 en el otro para que la ecuación siga equilibrada.
- Recuerda la regla de oro del álgebra. Lo que hagas en un lado de una ecuación debes hacerlo también en el otro para mantener el equilibrio. Es por ello que a 15 se le sustrae 7. Solo sustraemos 7 una vez por lado, lo que explica la razón por la cual no se sustrae también 7 al -4x.
-
3Suma o resta la constante en ambos lados de la ecuación. Esta operación completará el proceso de aislamiento del término de la variable. Restar 7 de +7 en el lado izquierdo de la ecuación no dejará una constante (es decir, quedará en 0) en dicho lado. Restar 7 de +15 en el lado derecho de la ecuación te dejará con 8. Por lo tanto, la nueva ecuación es -4x = 8.
- -4x + 7 = 15 =
- -4x = 8
-
4Elimina el coeficiente de la variable mediante la división o multiplicación. El coeficiente es el número junto a la variable. En este ejemplo, el coeficiente es -4. Para eliminar el -4 en -4x, deberás dividir ambos lados de la ecuación entre -4. En este momento, la x se multiplica por -4, de modo que lo opuesto de esta operación es la división y tendrás que efectuarla en ambos lados.
- Una vez más, lo que hagas en la ecuación, debes hacerlo en ambos lados. Es por ello que ves el “÷ -4” dos veces.
-
5Despeja la variable. Para hacerlo, divide el lado izquierdo de la oración, -4x entre -4 es igual a x. Divide el lado derecho de la ecuación, 8 entre -4 es igual a -2. Por lo tanto, x = -2. Has utilizado dos pasos (sustracción y división) para resolver este problema.




SEGUNDO PARCIAL
Concepto de función
- Función polinómica
- Función radical
- Función inversa
- Funciones trascendentes
- Funciones definidas a trozos
- Función derivada
- Funciones inyectivas, sobreyectivas y biyectivas
- Funciones explícitas e implícitas
- Función valor absoluto
Función polinómica

Función constante

En términos matemáticos, la función f es constante si para cualquier par de puntos x1 y x2 del dominio tales que x1<x2, se cumple que f(x1) = f(x2).

La gráfica de una función constante es una recta paralela al eje de abscisas X.
Función polinómica de primer grado
Las funciones polinómicas de primer grado o de grado 1 son aquellas que tienen un polinomio de grado 1 como expresión. Están compuestas por un escalar que multiplica a la variable independiente más una constante. Su mayor exponente es x elevado a 1.


Su representación gráfica es una recta de pendiente m.
La m es la pendiente y la n la ordenada, o punto en donde corta la recta f al eje de ordenadas. Según los valores de m y n existen tres tipos:
Función afín
Una función afín es una función polinómica de primer grado que no pasa por el origen de coordenadas, o sea, por el punto (0,0).
Las funciones afines son rectas definidas por la siguiente fórmula:
Los escalares m y n son diferentes de 0.

Función lineal
Una función lineal es una función polinómica de grado 1 que pasa por el origen de coordenadas, es decir, por el punto (0,0). Son funciones rectas de la forma:


También se llaman funciones de proporcionalidad directa. La constante m es la razón de proporcionalidad.
El término independiente n de la función afín es cero.
Función identidad
Estas funciones también suele denotarse por id.

La función identidad es una función lineal de pendiente m = 1 que pasa por el origen de coordenadas, es decir, por el punto (0,0). Divide el primer y el tercer cuadrante en partes iguales, o sea, es su bisectriz.
La función identidad es importante en la función inversa.
Función cuadrática
Las funciones cuadráticas (o funciones de segundo grado) son funciones polinómicas de grado 2, es decir, el mayor exponente del polinomio es x elevado a 2 (x2):

Su representación gráfica es una parábola vertical.

Una función cuadrática puede tener dos raíces reales, una o ninguna. Las raíces de una función son los elementos del dominio que la hacen nula. Es decir, son los puntos donde la gráfica de la función corta al eje X.
Función cúbica
Las funciones cúbicas (o funciones de tercer grado) son funciones polinómicas de grado 3, es decir, las que el mayor exponente del polinomio es x elevado a 3 (x3):

La representación gráfica de la función cúbica es:

Una función cúbica puede tener tres raíces reales dos o una. Las raíces de una función son los elementos del dominio que la hacen nula. Es decir, son los puntos donde la gráfica de la función corta al eje X.
Función racional
Las funciones racionales f(x) son el cociente irreducible de dos polinomios (para ello, no deben tener las mismas raíces). La palabra racional hace referencia a que esta función es una razón.

P(x) es el polinomio del numerador y Q(x) el del denominador (La variable x debe de estar en el denominador).
El dominio de una función racional son todos los números reales excepto los valores de la variable x que anulan el denominador (Q(x)) = 0), es decir, excepto las raíces del polinomio correspondiente al denominador.
La gráfica de estas funciones, si el polinomio del denominador Q(x) es de grado 1, es una hipérbola:

Función de proporcionalidad inversa
Una función de proporcionalidad inversa es la que, cuando aumenta la variable independiente disminuye la variable dependiente o viceversa.
Su forma más simple es:

k es el coeficiente de proporcionalidad inversa.
Su dominio y su codominio son los números reales, excepto en las asíntotas, en donde hay un punto de ruptura.
Si k > 0, la función es decreciente y está en el primer y tercer cuadrante.

Si k < 0, la función es creciente y está en el segundo y cuarto cuadrante.

La gráfica es una hipérbola con una asíntota vertical y otra horizontal.
Función radical
Una función radical o función raíz es la que la variable dependiente y se obtiene de una raíz que alberga en el radicando a la variable independiente x.
Son llamadas también funciones irracionales.
Cuando el índice de la raíz n es par, el dominio de la función son los valores de x que hacen al radicando cero o mayor que cero.

Cuando el índice es impar, el dominio son los números reales.
Un ejemplo de gráfica de función radical con índice n impar:

Función inversa
Sea f una función que asigna a los elementos de un primer conjunto (conjunto inicial X) un elemento de un segundo conjunto (conjunto final Y). La función inversa (o función recíproca) de f (denotada por f-1) es aquella que hace el camino inverso, asignando a los elementos de Y elementos de X.

Formalmente, diremos que f-1 es la inversa de f si:
También podemos definir una función inversa a partir de la composición de funciones. f-1 es la inversa de f y f-1 si la composición de f da la función identidad.
Funciones trascendentes
Una función trascendente es la que la variable independiente x se encuentra en el exponente, el índice de una raíz, en un logaritmo o en una función trigonométrica.
Para una función trascendente no basta con operaciones algebraicas, sinó que se requieren cálculos como derivadas, integrales, trigonometría, etc.
Son funciones trascendentes las exponenciales, logarítmicas o las trigonométricas.
Función exponencial
Una función exponencial es aquella que la variable independiente x aparece en el exponente y tiene de base una constante a. Su expresión es:
siendo a un real positivo, a > 0, y diferente de 1, a ≠ 1.

También se suele denotar la función como exp (x).
Función logarítmica
Una función logarítmica está formada por un logaritmo de base a, y es de la forma:
siendo a un real positivo, a > 0, y diferente de 1, a ≠ 1.

Funciones trigonométricas
las funciones trigonometricas f son aquellas que están asociadas a una razón trigonométrica.

Las razones trigonométricas de un ángulo α son las obtenidas entre los tres lados de un triángulo rectángulo. Es decir, las comparaciones por su cociente de sus tres lados a, b y c.
Existen seis funciones trigonométricas:
Seno


Su abreviatura son sen o sin (del latín sinus).
La gráfica de la función seno es:

La función del seno es periódica de período 360º (2π radianes), por lo que esta sección de la gráfica se repetirá en los diferentes períodos.
- Dominio:

- Codominio:

- Derivada de la función seno:

- Integral de la función seno:

Coseno
El coseno de un ángulo α se define como la razón entre el cateto contiguo o cateto adyacente (b) y la hipotenusa (c).

Su abreviatura es cos (del latín cosinus).
La gráfica de la función coseno es:

- Dominio:

- Codominio:

- Derivada de la función coseno:

- Integral de la función coseno:

Tangente
La tangente de un ángulo α es la razón entre el cateto opuesto (a) y el cateto contiguo o cateto adyacente (b).

Su abreviatura son tan o tg.
La gráfica de la función tangente es:

- Dominio:
 (excepto π/2 + a · π), siendo a un número entero. O, con esta casuística: x ≠ ±π/2; ±3π/2; ±5π/2;…
(excepto π/2 + a · π), siendo a un número entero. O, con esta casuística: x ≠ ±π/2; ±3π/2; ±5π/2;… - Codominio:

- Derivada de la función tangente:

- Integral de la función tangente:

Cosecante
La cosecante del ángulo α de un triángulo rectángulo se define como la razón entre la hipotenusa (c) y el cateto opuesto (a).

Su abreviatura es csc o cosec.
La gráfica de la función cosecante es:

- Dominio:
 (excepto a · π), siendo a un número entero.
(excepto a · π), siendo a un número entero. - Codominio:

- Derivada de la función cosecante:

- Integral de la función cosecante:

Secante
La secante de un ángulo α de un triángulo rectángulo se define como la razón entre la hipotenusa (c) y el cateto contiguo o cateto adyacente (b).

Su abreviatura es sec.
La gráfica de la función secante es:

- Dominio:
 (excepto π/2 + a · π), siendo a un número entero. O, con esta casuística: x ≠ ±π/2; ±3π/2; ±5π/2;…
(excepto π/2 + a · π), siendo a un número entero. O, con esta casuística: x ≠ ±π/2; ±3π/2; ±5π/2;… - Codominio:

- Derivada de la función secante:

- Integral de la función secante:

Cotangente
La cotangente de un ángulo α de un triángulo rectángulo se define como la razón entre el cateto contiguo o cateto adyacente (b) y el cateto opuesto (a).

Su abreviatura es cot, cotg o cotan.
La gráfica de la función cotangente es:

- Dominio:
 (excepto a · π), siendo a un número entero.
(excepto a · π), siendo a un número entero. - Codominio:

- Derivada de la función cotangente:

- Integral de la función cotangente:

Funciones definidas a trozos
Las funciones definidas a trozos (o función por partes) si la función tiene distintas expresiones o fórmulas dependiendo del intervalo (o trozo) en el que se encuentra la variable independiente (x).
Por ejemplo:


La imagen de un valor x se calcula según en que intervalo se encuentra x. Por ejemplo, el 0 se encuentra en el intervalo (-∞,1), por lo que su imagen es f(0)=0. El valor 3 está en el intervalo [1,4], entonces su imagen es f(3)=2.
Función derivada de una función
La función derivada f’ de una función f que sea derivable en un intervalo I es una nueva función que hace corresponder para cada valor de x ∈ I el valor de la derivada de f en ese punto.
En otras palabras, la función derivada f’ recoge todos los valores de las derivadas de f existentes en todos los puntos de su dominio.
Puede ocurrir que f no tenga derivada en todo su dominio. En ese caso, el dominio de la función derivada f’ es más pequeño que el dominio de f.
La expresión de la función derivada respecto a la función inicial es el siguiente límite:

La función derivada f’ de una función f, derivable en I, cuando el incremeto de la variable x ∈ I tiende a cero, es el cociente entre el incremento de la función inicial y el incremento de la variable independiente x.
Funciones inyectivas, sobreyectivas y biyectivas
La inyectividad, sobreyectividad y biyectividad dan información acerca de como se relacionan los elementos del conjunto inicial X con el conjunto final Y.
Cabe recordar que una función f es una relación que asigna a los elementos de un primer conjunto (conjunto inicial X) un elemento de un segundo conjunto (conjunto final Y).


Función inyectiva
La función f es inyectiva si cada elemento del conjunto final Y tiene un único elemento del conjunto inicial X al que le corresponde. Es decir, no pueden haber más de un valor de X que tenga la misma imagen Y. Reciben también el nombre de funciones “uno a uno”.
No siempre todos los elementos del conjunto final Y deben corresponderse con alguno del conjunto inicial X.

Dicho de otra manera: una función es inyectiva si se cumple que a valores de su dominio x0 ≠ x1 ⇒ f(x0) ≠ f(x1).
Una comprobación gráfica de la inyectividad de una función es cuando cualquier recta paralela al eje X corta a la misma, como máximo, en un punto.
Función sobreyectiva
Una función f es sobreyectiva (o suprayectiva) si todo elemento del conjunto final Y tiene al menos un elemento del conjunto inicial X al que le corresponde.

Es decir, una función es sobreyectiva si el recorrido de la función es el conjunto final Y. Dicho de otra manera, una función es sobreyectiva cuando son iguales su codominio y su dominio.
En términos matemáticos, una función f es sobreyectiva si:
Función biyectiva
Una función f es biyectiva si es al mismo tiempo inyectiva y sobreyectiva. Es decir, si todo elemento del conjunto final Y tiene al menos un elemento del conjunto inicial X al que le corresponde (condición de función sobreyectiva) y todos los elementos del conjunto inicial X tiene una única imagen en el conjunto final Y (condición de función inyectiva).
Digamos que no puede quedarse ningún elemento en el conjunto final Y solo, sin asociarse con un único elemento del conjunto inicial X.

Funciones explícitas e implícitas
Una función explícita es aquella que está expresada de forma que la variable dependiente está despejada. Es decir, y = f(x).
Un ejemplo de función explícita sería:
Una función implícita es aquella que está expresada de forma que la variable dependiente y no está despejada. Es decir, que y no está definida en función solo de la variable independiente x.
Un ejemplo de función implícita sería:
Una función en forma implícita, despejando, siempre se puede pasar a la forma de una función explícita.
Función valor absoluto
La función valor absoluto devuelve el valor numérico del segundo término, pero afectado siempre del signo positivo. Tiene sentido para caracterizar distancias, longitudes.
La expresión más simple de una función valor absoluto es: f(x) = |x| y la gráfica son dos rectas simétricas en el primer y segundo cuadrante, con pendientes 1 y -1 (forma de “V”) que se cortan en el origen (0,0).

Una función valor absoluto se puede desplazar, simplemente, deslizándose el vértice a derecha e izquierda por el eje de las X con esta forma: f(x) = |x| + k. (si k es un número positivo, la gràfica se desplaza una distancia k hacia la derecha; si k es un número negativo, la gráfica se desplaza una distancia k hacia la izquierda. El vértice estará en (k, 0).

También se puede desplazar verticalmente, deslizándose el vértice arriba o abajo por el eje de las Y con esta forma: f(x) = |x + k|. (si k es un número positivo, la gráfica se desplaza una distancia k hacia arriba; si k es un número negativo, la gráfica se desplaza una distancia k hacia abajo. El vértice estará en (0, k).


Dominio y rango de una función
El dominio de una función f ( x ) es el conjunto de todos los valores para los cuales la función está definida, y el rango de la función es el conjunto de todos los valores que f toma.
(En gramática, probablemente le llame al dominio el conjunto reemplazo y al rango el conjunto solución. Quizá también estos han sido llamados la entrada y salida de la función.)
Ejemplo 1:
Considere la función mostrada en el diagrama.
Aquí, el dominio es el conjunto { A , B , C , E }. D no está en el dominio, ya que la función no está definida para D .
El rango es el conjunto {1, 3, 4}. 2 no está en el rango, ya que no hay letra en el dominio que se enlace con el 2.
Ejemplo 2:
El dominio de la función
f ( x ) = 1/ x
es todos los números reales excepto el cero (ya que en x = 0, la función no está definida: la división entre cero no está permitida!).
El rango también es todos los números reales excepto el cero. Puede ver que hay algún punto en la curva para cada valor de y excepto para y = 0.
Los dominios pueden también estar explícitamente especificados, si hay valores para los cuales la función pudiera estar definida, pero que no deseamos considerarlos por alguna razón.
Ejemplo 3:
La notación siguiente muestra que el dominio de la función está restringido al intervalo (–1, 1).
f ( x ) = x 2 , –1  x 1
x 1
x 1
La gráfica de esta función es como se muestra. Dese cuenta de los círculos abiertos, que muestran que la función no está definida en x = –1 y x = 1. Los valores del rango de y desde 0 hasta el 1 (incluyendo el 0, pero no incluyendo el 1). Así el rango de la función es
0  y < 1.
y < 1.
y < 1.
Sumar dos funciones
Ejemplo
Observemos un ejemplo para ver cómo funciona esto.
Dadas f, left parenthesis, x, right parenthesis, equals, x, plus, 1 y g, left parenthesis, x, right parenthesis, equals, x, squared, minus, 2, x, plus, 5, encuentra left parenthesis, f, plus, g, right parenthesis, left parenthesis, x, right parenthesis.
Solución
La parte más difícil de combinar funciones es entender la notación. ¿Qué significa left parenthesis, f, plus, g, right parenthesis, left parenthesis, x, right parenthesis?
Bueno, left parenthesis, f, plus, g, right parenthesis, left parenthesis, x, right parenthesis significa simplemente encontrar la suma de f, left parenthesis, x, right parenthesis y g, left parenthesis, x, right parenthesis. Matemáticamente, quiere decir que left parenthesis, f, plus, g, right parenthesis, left parenthesis, x, right parenthesis, equals, f, left parenthesis, x, right parenthesis, plus, g, left parenthesis, x, right parenthesis.
Ahora el problema nos es familiar.
También podemos verlo gráficamente:
Las imágenes de abajo muestran las gráficas de y, equals, f, left parenthesis, x, right parenthesis, y, equals, g, left parenthesis, x, right parenthesis, y y, equals, left parenthesis, f, plus, g, right parenthesis, left parenthesis, x, right parenthesis.


De la primera gráfica, podemos ver que f, left parenthesis, 2, right parenthesis, equals, start color #1fab54, 3, end color #1fab54 y g, left parenthesis, 2, right parenthesis, equals, start color #11accd, 5, end color #11accd; de la segunda gráfica, que left parenthesis, f, plus, g, right parenthesis, left parenthesis, 2, right parenthesis, equals, start color #e07d10, 8, end color #e07d10.
Así f, left parenthesis, 2, right parenthesis, plus, g, left parenthesis, 2, right parenthesis, equals, left parenthesis, f, plus, g, right parenthesis, left parenthesis, 2, right parenthesis, puesto que start color #1fab54, 3, end color #1fab54, plus, start color #11accd, 5, end color #11accd, equals, start color #e07d10, 8, end color #e07d10.
Ahora inténtalo tú. Convéncete de que f, left parenthesis, 1, right parenthesis, plus, g, left parenthesis, 1, right parenthesis, equals, left parenthesis, f, plus, g, right parenthesis, left parenthesis, 1, right parenthesis.
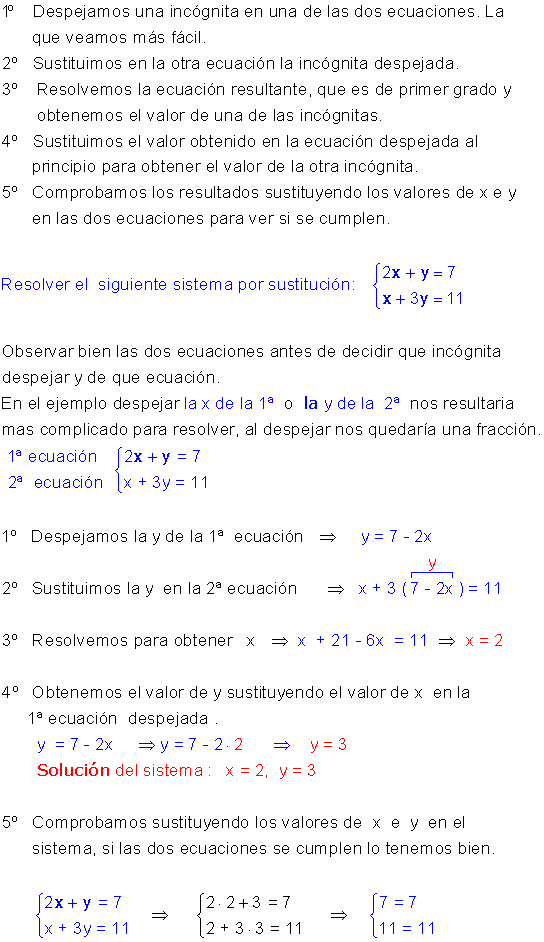
Método de sustitución
Método de reducción

Método de igualación

TERCER PARCIAL
En un sentido puramente matemático, sin embargo, un vector no puede definirse a partir de módulo y dirección, sino que se considera a los vectores como elementos de un espacio vectorial. Esto es así ya que, matemáticamente hablando, pueden existir vectores en espacios de dimensión infinita, donde no pueden representarse longitudes ni orientaciones.
En particular, se los define como una dupla de números reales que definen las componentes del vector. La representación que se utiliza para representar a un vector en un espacio de n dimensiones es:
Para que un vector matemático pueda ser considerado también como un vector físico, los valores numéricos de sus componentes deben transformarse de acuerdo con ciertas relaciones de carácter fijo, además de que deben de ser medidas por diferentes observadores. Además, los vectores pueden sumarse entre sí, dando origen a un nuevo vector resultante, o bien multiplicarse por un valor escalar.
Elementos de un vector
Para definir a un vector de manera completa, se deben especificar tres características que distinguen a un vector de otro:
- El módulo: que viene determinado por la longitud o largo del segmento de recta.
- La dirección: que viene determinado por la orientación que presenta la recta en el plano.
- El sentido: que viene determinado por el origen y el extremo final del segmento de recta.
Representación de un vector
Los vectores se representan de forma escrita en letra negrita, para poder diferenciarlas de las magnitudes escalares (que se escriben en cursiva). Además, los vectores se escriben colocando una flecha sobre la letra que designa su módulo, teniendo en cuenta que el módulo por si solo es una magnitud escalar.
Los vectores fijos del plano, por el contrario, se indican con letras mayúsculas, donde la primera indica el origen y la segunda el extremo final.
Clases de vectores
Pueden distinguirse diversas clases de vectores según las características que presenten y la relación que tengan con otros vectores:
- Vectores unitarios: son los vectores de módulo unidad.
- Vectores libres: son los vectores que no se encuentran aplicados en ningún punto en particular.
- Vectores deslizantes: son los vectores cuyo punto de aplicación de desliza a lo largo de recta de acción.
- Vectores fijos (o vectores ligados): son los vectores que están aplicados en un punto particular.
- Vectores colineales: son dos o más vectores que actúan en una misma recta de acción.
- Vectores concurrentes (o vectores angulares): son dos o más vectores cuyas direcciones pasan por un mismo punto, formando un ángulo al cruzarse las semirrectas.
- Vectores paralelos: son dos o más vectores que actúan sobre un cuerpo rígido con líneas de acción paralelas.
- Vectores opuestos: son los vectores que tienen la misma dirección y el mismo módulo, pero que presentan sentidos contrarios.
- Vectores coplanarios: son los vectores cuyas rectas de acción se encuentran situadas en el mismo plano.
- Vector resultante: dado un sistema de vectores, es el vector que produce el mismo efecto que todos los vectores componentes del sistema.
- Vector equilibrante: es un vector con la misma magnitud y dirección que el vector resultante, pero que tiene sentido opuesto.
Vectores en dos y en tres dimensiones
Los vectores puede representarse en espacios de dos dimensiones (x, y) o de tres dimensiones (x, y, z). En cualquier caso, los vectores pueden ser definidos mediante sus coordenadas en cada uno de los ejes. En el caso de un espacio de dos dimensiones, un vector cualquiera puede ser definido como: 
Donde los términos entre paréntesis son las coordenadas sobre los ejes x e y. Por otro lado, en un espacio de tres dimensiones (o espacio tridimensional), un vector se define como: 
Donde se agrega una coordenada más para indicar la coordenada sobre el eje z.
Representación gráfica de los vectores
Los vectores se representan de forma general en un espacio euclidiano, recurriendo a un plano de dos o tres dimensiones.
- En primer lugar, se grafica la recta soporte o dirección, sobre la cual pueden existir varios vectores, dibujando un segmento de recta que surge del origen.
- En segundo lugar, se marca la longitud del vector, el cual está determinado por el módulo (a mayor módulo, mayor longitud de la semirrecta), y que está dirigido a una dirección o punto de aplicación (razón por la cual se dibuja a los vectores como flechas que apuntan hacia la dirección en cuestión).
- Por último, se escribe el nombre del vector sobre el punto de aplicación.
Definición

Se llama vector de dimensión a una tupla de números reales (que se llaman componentes del vector). El conjunto de todos los vectores de dimensión se representa como (formado mediante el producto cartesiano).


Así, un vector perteneciente a un espacio se representa como:

, donde


Un vector también se puede ver desde el punto de vista de la geometría como vector geométrico (usando frecuentemente el espacio tridimensional o bidimensional ).


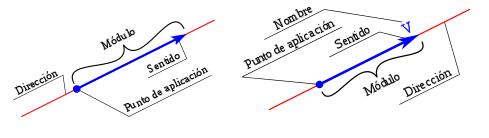
Un vector fijo del plano euclídeo es un segmento orientado, en el que hay que distinguir tres características:345
- Módulo: la longitud del segmento expresado en términos de un valor numérico y una unidad.
- Dirección: el ángulo del vector con respecto al eje x.
- Sentido: la orientación del segmento, del origen al extremo del vector. Puede ser positivo o negativo.
En inglés, la palabra direction indica tanto la dirección como el sentido del vector, con lo que se define el vector con solo dos características: módulo y dirección.6
Los vectores fijos del plano se denotan con dos letras mayúsculas (y una flecha hacia la derecha encima), por ejemplo , que indican su origen y extremo respectivamente. Es decir, el punto A es el origen o punto de aplicación y el punto B es el extremo del vector , cuyas coordenadas son:


Características de un vector

Un vector se puede definir por sus coordenadas, si el vector está en el plano xy, se representa:

siendo sus coordenadas:

Si consideramos el triángulo formado por los componentes (como catetos) y (como hipotenusa): se puede calcular multiplicando por el cosα (siendo α el ángulo formado por y ) o multiplicando por el senβ (siendo β el ángulo formado por y ). De igual forma se puede calcular multiplicando por el senα o multiplicando por el cosβ (considerando las posiciones de α y β mencionadas anteriormente).




Siendo el vector la suma vectorial de sus coordenadas:


Si un vector es de tres dimensiones reales, representado sobre los ejes x, y, z, se puede representar:

siendo sus coordenadas:

Si representamos el vector gráficamente podemos diferenciar los siguientes elementos:
La recta soporte o dirección, sobre la que se traza el vector.

El módulo o amplitud con una longitud proporcional al valor del vector.

El sentido, indicado por la punta de flecha, siendo uno de los dos posibles sobre la recta soporte.

El punto de aplicación que corresponde al lugar geométrico al cual corresponde la característica vectorial representado por el vector.

El nombre o denominación es la letra, signo o secuencia de signos que define al vector.

Por lo tanto en un vector podemos diferenciar:

- Nombre
- Dirección
- Sentido
- Módulo
- Punto de aplicación
Magnitudes vectoriales


Frente a aquellas magnitudes físicas, tales como la masa, la presión, el volumen, la energía, la temperatura, etc; que quedan completamente definidas por un número y las unidades utilizadas en su medida, aparecen otras, tales como el desplazamiento, la velocidad, la aceleración, la fuerza, el campo eléctrico, etc., que no quedan completamente definidas dando un dato numérico, sino que llevan asociadas una dirección. Estas últimas magnitudes son llamadas vectoriales en contraposición a las primeras llamadas escalares.
Las magnitudes vectoriales quedan representadas por un ente matemático que recibe el nombre de vector. En un espacio euclidiano, de no más de tres dimensiones, un vector se representa por un segmento orientado. Así, un vector queda caracterizado por los siguientes elementos: su longitud o módulo, siempre positivo por definición, y su dirección, la cual puede ser representada mediante la suma de sus componentes vectoriales ortogonales, paralelas a los ejes de coordenadas; o mediante coordenadas polares, que determinan el ángulo que forma el vector con los ejes positivos de coordenadas.78
Se representa como un segmento orientado, con una dirección, dibujado de forma similar a una "flecha". Su longitud representa el módulo del vector, la recta indica la dirección, y la "punta de flecha" indica su sentido.345
Notación
Las magnitudes vectoriales se representan en los textos impresos por letras en negrita, para diferenciarlas de las magnitudes escalares que se representan en cursiva. En los textos manuscritos, las magnitudes vectoriales se representan colocando una flecha sobre la letra que designa su módulo (el cual es un escalar).
- Ejemplos
- ... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de una magnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector: ...
- En los textos manuscritos se escribe: ... para los vectores y ... o ... para los módulos.





Cuando convenga, se representan la magnitud vectorial haciendo referencia al origen y al extremo del segmento orientado que la representa geométricamente; así, se designan los vectores representados en la Figura 2 en la forma , ... resultando muy útil esta notación para los vectores que representan el desplazamiento.

Además de estas convenciones los vectores unitarios o versores, cuyo módulo es la unidad, se representan frecuentemente con un circunflejo encima, por ejemplo .

Clasificación de vectores
Según los criterios que se utilicen para determinar la igualdad o equipolencia de dos vectores, pueden distinguirse distintos tipos de los mismos:
- Vectores libres: no están aplicados en ningún punto en particular.
- Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.
- Vectores fijos o ligados: están aplicados en un punto en particular.
Podemos referirnos también a:
- Vectores unitarios: vectores de módulo unidad.
- Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto. También se les suele llamar angulares porque forman un ángulo entre ellas.
- Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios.3 En inglés se dice que son de igual magnitud pero direcciones contrarias, ya que la dirección también indica el sentido.
- Vectores colineales: los vectores que comparten una misma recta de acción.
- Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.
- Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
Componentes de un vector

Un vector en el espacio euclídeo tridimensional se puede expresar como una combinación lineal de tres vectores unitarios o versores, que son perpendiculares entre sí y constituyen una base vectorial.
En coordenadas cartesianas, los vectores unitarios se representan por , , , paralelos a los ejes de coordenadas , , positivos. Los componentes del vector en una base vectorial predeterminada pueden escribirse entre paréntesis y separadas con comas:







o expresarse como una combinación de los vectores unitarios definidos en la base vectorial. Así, en un sistema de coordenadas cartesiano, será

Estas representaciones son equivalentes entre sí, y los valores , , , son los componentes de un vector que, salvo que se indique lo contrario, son números reales.



Una representación conveniente de las magnitudes vectoriales es mediante un vector columna o un vector fila, particularmente cuando están implicadas operaciones matrices (tales como el cambio de base), del modo siguiente:
![{\mathbf {a}}={\begin{bmatrix}a_{x}\\a_{y}\\a_{z}\\\end{bmatrix}}\qquad {\mathbf {a}}=[a_{x}\ a_{y}\ a_{z}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/74dd5bf24782a78879c23ed46b4f08fdc7e16421)
Con esta notación, los vectores cartesianos quedan expresados de la siguiente manera:
![{{\mathbf i}}=[1\ 0\ 0],\ {{\mathbf j}}=[0\ 1\ 0],\ {{\mathbf k}}=[0\ 0\ 1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/07c3a1a35a66b5e4b06fe445b3fba02953572873)
El lema de Zorn, consecuencia del axioma de elección, permite establecer que todo espacio vectorial admite una base vectorial, por lo que todo vector es representable como el producto de unos componentes respecto a dicha base. Dado un vector solo existen un número finito de componentes diferentes de cero.
Representación gráfica de los vectores
Hay personas que no recomienda usar gráficos para evitar la confusión de conceptos y la inducción al error, sin investigación que lo corrobore, también es cierto que la memoria se estimula con mejores resultados. Para ello:
- Se llama vector a la representación visual con el símbolo de flecha (un segmento y un triángulo en un extremo).
- La rectitud visual de una flecha o curvatura de la misma, no la hace diferente en símbolo si los dos extremos permanecen en el mismo lugar y orden.
- El que una flecha cierre en sí misma, indica la ausencia de efectos algebraicos.
- Para visualizar la suma de vectores se hará encadenándolos, es decir, uniendo el extremo que tiene un triángulo (final) del primer vector con el extremo que no lo tiene (origen) del segundo vector manteniendo la dirección y distancia, propias al espacio, de sus dos extremos, ya que estas dos cualidades los distingue visualmente de otros vectores.
- Los escalares se representarán con una línea de trazos a modo, exclusivamente, de distinción ya que no siempre pertenecen al espacio de vectores.
Se examinan cada uno de los casos que aparecen en la definición de las operaciones suma de vectores y producto por un escalar:
Suma de vectores
La definición suma de vectores en el orden u+v produce otro vector, es como encadenar, siempre visualmente, un vector u y luego uno v. Diremos que u+v se simplifica como un vector w o que w descompone como suma de vectores u y v.

- 1) Decir que u+v=v+u, es exigir que las dos sumas simplifiquen en el mismo vector, en negro. Véase que en física los vectores en rojo simulan la descomposición de fuerzas ejercidas por el vector negro en su origen, y se representa con un paralelogramo.

- 2) Decir que u+(v+w)=(u+v)+w, es exigir que las simplificaciones de sumas de vectores puedan ser optativas en cualquier cadena de sumas.

- 3) Decir que existe un vector cero (elemento neutro) tal que u+0=u, equivale a exigir que exista un vector incapaz de efectuar, mediante la suma, modificación alguna a todos los vectores.

- 4) Decir que u+(-u)=0, es exigir la existencia de un elemento opuesto, -u, que sumado a u simplifique en un vector cero.

Producto por un escalar[editar]
La definición producto por un escalar produce otro vector; es como modificar el extremo final del vector u, siempre visualmente.

Por un lado la representación del producto en el caso que el cuerpo de los escalares sea modifica, visualmente, la longitud de la imagen del vector, quedando ambos siempre superpuestos; por otro lado las representaciones en el caso que además de modificar la longitud, también agrega rotaciones, para facilitarlas visualmente considérense centradas en el origen del vector, siendo estas modificaciones un poco más expresivas, visualmente, pero no más fáciles que en el caso real:



- a)Decir que a(bu)=(ab)u, es exigir que los productos encadenados a(b(u)) pueden simplificarse como uno, c=ab, luego (ab)u queda como cu.

- b) Decir que existe el escalar 1 tal que 1u=u, equivale a decir exista un escalar incapaz de efectuar, mediante producto, modificación alguna a todos los vectores.

- c) Decir que a(u+v)=au+av, es exigir la propiedad distributiva respecto la suma vectorial.

- d) Decir que (a+b)u=au+bu, es exigir la propiedad distributiva respecto la suma escalar.

Para el caso real se han de eliminar las rotaciones de los ejemplos anteriores.
Suma de vectores
Para sumar dos vectores libres (vector y vector) se escogen como representantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector.
Suma de vectores sobre un mismo punto
La suma de vectores está bien definida si ambos vectores pertenecen al mismo espacio vectorial, en física para que dos vectores puedan ser sumados deben estar aplicados en el mismo punto. La composición de fuerzas sobre un sólido rígido cuando los puntos de aplicación no coinciden lleva a la noción de momento de fuerza dados dos fuerzas con puntos de aplicación se definen la fuerza resultante como el par:



Donde es la suma generalizada a vectores aplicados en diferentes puntos. El punto de aplicación es el punto de intersección de las rectas de acción de las fuerzas. Los componentes del vector de fuerza resultante es de hecho la suma de componentes ordinarias de vectores:



El momento resultante es el momento de fuerza del conjunto de fuerzas respecto al punto calculado para la fuerza resultante.
Método del paralelogramo

Este método permite solamente sumar vectores de dos en dos. Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en un punto, trazando rectas paralelas a cada uno de los vectores, en el extremo del otro y de igual longitud, formando así un paralelogramo (ver gráfico). El vector resultado de la suma es la diagonal de dicho paralelogramo que parte del origen común de ambos vectores.
Método del triángulo o método poligonal

Consiste en disponer gráficamente un vector a continuación de otro, ordenadamente: el origen de cada uno de los vectores coincidirá con el extremo del siguiente. El vector resultante es aquel cuyo origen coincide con el del primer vector y termina en el extremo del último.
Método analítico para la suma y diferencia de vectores
Dados dos vectores libres,


El resultado de su suma o de su diferencia se expresa en la forma

y ordenando los componentes,

Con la notación matricial sería

Conocidos los módulos de dos vectores dados, y , así como el ángulo que forman entre sí, el módulo de es:





La deducción de esta expresión puede consultarse en deducción del módulo de la suma.
Producto de un vector por un escalar

El producto de un vector por un escalar es otro vector cuyo módulo es el producto del escalar por el módulo del vector, cuya dirección es igual a la del vector, y cuyo sentido es contrario a este si el escalar es negativo.
Partiendo de la representación gráfica del vector, sobre la misma línea de su dirección tomamos tantas veces el módulo de vector como indica el escalar.
Sean un escalar y un vector, el producto de por se representa y se realiza multiplicando cada una de los componentes del vector por el escalar; esto es,



Con la notación matricial sería

Producto escalar
Producto vectorial
Derivada ordinaria de un vector
Dado un vector que es función de una variable independiente

Calculamos la derivada ordinaria del vector con respecto de la variable t, calculando la derivada de cada una de sus componentes como si de escalares se tratara:

teniendo en cuenta que los vectores unitarios son constantes en módulo y dirección.
Con notación matricial sería



Veamos un ejemplo de derivación de un vector, partiendo de una función vectorial:
Esta función representa una curva helicoidal alrededor del eje z, de radio unidad, como se ilustra en la figura. Podemos imaginar que esta curva es la trayectoria de una partícula y la función representa el vector posición en función del tiempo t. Derivando tendremos:


Realizando la derivada:

La derivada del vector posición respecto al tiempo es la velocidad, así que esta segunda función determina el vector velocidad de la partícula en función del tiempo, podemos escribir:

Este vector velocidad es un vector tangente a la trayectoria en el punto ocupado por la partícula en cada instante. El sentido es hacia los valores crecientes de los valores escalares.6 Si derivásemos de nuevo obtendríamos el vector aceleración.
Derivada covariante de un vector
Cuando en lugar de emplear una "base fija" en todo el dominio de un vector se usan "bases móviles" como cuando se emplean coordenadas curvilíneas la variación total de un vector dependiente del tiempo depende no solo de la variación de componentes como en el caso de la derivada ordinaria sino también de la variación de la orientación de la base. La variación total se llama derivada covariante:

Cuando se emplea una base fija (coordenadas cartesianas) la derivada covariante coincide con la derivada ordinaria. Por ejemplo cuando se estudia el movimiento de una partícula desde un sistema de referencia no inercial en rotación, las aceleraciones de Coriolis y centrípeta se deben a los factores que contienen y otros factores menos comunes.

Ángulo entre dos vectores
El ángulo determinado por las direcciones de dos vectores y viene dado por:

Descomposiciones de un vector
Dado un vector y una dirección de referencia dada por un vector unitario se puede descomponer el primer vector en un componente paralela y otro componente perpendicular a la dirección de referencia:


En física esta descomposición se usa en diferentes contextos como descomponer la aceleración en un componente paralela a la velocidad y otro componente perpendicular a la misma. También el tensión mecánica en un punto sobre un plano puede descomponerse en un componente normal al plano y otra paralela.
También dado un campo vectorial definido sobre un dominio de Lipschitz, acotado, simplemente conexo y de cuadrado integrable admite la llamada descomposición de Helmholtz como suma de un campo conservativo y un campo solenoidal:




En matemáticas las rotaciones son transformaciones lineales que conservan las normas en espacios vectoriales en los que se ha definido una operación de producto interior. La matriz de transformación tiene la propiedad de ser una matriz unitaria, es decir, es ortogonal y su determinante es 1. Sea un vector expresado en un sistema de coordenadas cartesianas (x, y, z) con una base vectorial asociada definida por los versores ; esto es,




Ahora, supongamos que giramos el sistema de ejes coordenados, manteniendo fijo el origen del mismo, de modo que obtengamos un nuevo triedro ortogonal de ejes (x′, y′, z′), con una base vectorial asociada definida por los versores . Los componentes del vector en esta nueva base vectorial serán:




La operación de rotación de la base vectorial siempre puede expresarse como la acción de un operador lineal (representado por una matriz) actuando sobre el vector (multiplicando al vector):

que es la matriz de transformación para el cambio de base vectorial.

- Ejemplo
En el caso simple en el que el giro tenga magnitud alrededor del eje z, tendremos la transformación:


Al hacer la aplicación del operador, es decir, al multiplicar la matriz por el vector, obtendremos la expresión del vector en la nueva base vectorial:

siendo



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
los componentes del vector en la nueva base vectorial.


