
Escuela De Educacion Básica
“ MANUEL ABAD ”
INTEGRANTES₁ JHONNY ERAS , MAYKEL QUINTANILLA, ANDERSON CHICAIAZA ,MARIO CONGO , ALISON PAVÓN
MATERIA᠙ MATEMÁTICAS
I PARCIAL
LOS POLINOMIOS
Polinomio:
En álgebra, un polinomio puede tener más de una variable (x, y, z), constantes (números enteros o fracciones) y exponentes (que solo pueden ser números positivos enteros).
Vea también Álgebra.
Los polinomios están formados por términos finitos. Cada término es una expresión que contiene uno o más de los tres elementos de los que están hechos: variables, constantes o exponentes. Por ejemplo: 9, 9x, 9xy son todos términos. Otra forma de identificar los términos es que se separan por sumas y restas.
Para resolver, simplificar, sumar o restar polinomios se deben agrupar los términos con las mismas variables como, por ejemplo, los términos con x, los términos con y y los términos que no tienen variables. Además, es importante fijarse en el signo que está antes del término que determinará si suma, resta o multiplica. Por ejemplo:
4x + 5y + 2xy + 2y +2
Se agrupan, suman o restan los términos con las mismas variables, o sea:
+4x = 4x
+5y +2y = 7y
+2xy = 2xy
+2 = 2
Resultado final es: 4x + 7y + 2xy + 2
Tipos de polinomios
La cantidad de términos que un polinomio tiene indicará qué tipo de polinomio es, por ejemplo,
- Polinomio de un término: monomio, por ejemplo, 8xy.
- Polinomio de dos términos: binomio, por ejemplo, 8xy - 2y.
- Polinomio de tres términos: trinomio, por ejemplo, 8xy - 2y + 4.
Grado de polinomio
El grado de un polinomio de una sola variable es el mayor exponente. El grado de un polinomio con más de una variable es determinado por el término con el mayor exponente. Por ejemplo: el polinomio 3x+8xy+7x2y
3x: grado 1
8xy: grado 2 (x:1 + y:1= 2)
7x2y:grado 3 (x:2 + y:1=3)
Esto significa que el grado del polinomio es 3 siendo el mayor exponente de los tres términos que lo componen.


la variable representa la incógnita, mientras que el coeficiente 3 y los números 1 y 9 son constantes conocidas. La igualdad planteada por una ecuación será cierta o falsa dependiendo de los valores numéricos que tomen las incógnitas; se puede afirmar entonces que una ecuación es una igualdad condicional, en la que solo ciertos valores de las variables (incógnitas) la hacen cierta.

Se llama solución de una ecuación a cualquier valor individual de dichas variables que la satisface. Para el caso dado, la solución es:

En el caso de que todo valor posible de la incógnita haga cumplir la igualdad, la expresión se llama . Si en lugar de una igualdad se trata de una desigualdad entre dos expresiones matemáticas, se denominará
El símbolo «=», que aparece en cada ecuación, fue inventado en 1557 por Robert Recorde, que consideró que no había nada más igual que dos líneas rectas paralelas de la misma longitud.
La ciencia utiliza ecuaciones para enunciar de forma precisa leyes; estas ecuaciones expresan relaciones entre variables. Así, en física, la ecuación de la dinámica de Newton relaciona las variables fuerza F, aceleración a y masa m: F = ma. Los valores que son solución de la ecuación anterior cumplen la primera ley de la mecánica de Newton. Por ejemplo, si se considera una masa m = 1 kg y una aceleración a = 1 m/s, la única solución de la ecuación es F = 1 kg·m/s = 1 newton, que es el único valor para la fuerza permitida por la ley.
La ciencia utiliza ecuaciones para enunciar de forma precisa leyes; estas ecuaciones expresan relaciones entre variables. Así, en física, la ecuación de la dinámica de Newton relaciona las variables fuerza F, aceleración a y masa m: F = ma. Los valores que son solución de la ecuación anterior cumplen la primera ley de la mecánica de Newton. Por ejemplo, si se considera una masa m = 1 kg y una aceleración a = 1 m/s, la única solución de la ecuación es F = 1 kg·m/s = 1 newton, que es el único valor para la fuerza permitida por la ley.
Tipos de ecuacion
- Ecuaciones polinómicas enteras.
- Tipos de ecuaciones polinómicas.
- Ecuaciones polinómicas racionales.
- Ecuaciones polinómicas irracionales.
- Ecuaciones no polinómicas.

Sistema de numeracion
Un sistema de numeración generación que permiten construir todos los válidos. Un sistema de numeración puede representarse como: o

donde:
- es el sistema de numeración considerado
- es el conjunto de símbolos permitidos en el sistema. En el caso del sistema decimal son {0,1,...9}; en el binario son {0,1}; en el octal son {0,1,...7}; en el hexadecimal son {0,1,...9,A,B,C,D,E,F}.
- son las reglas que nos indican qué números y qué operaciones son válidos en el sistema, y cuáles no. En un sistema de las reglas son bastante simples, que la requiere reglas algo más elaboradas.



Estas reglas son diferentes, para cada de numeración considerado, pero una regla común a todos es que para construir números válidos en un sistema de numeración determinado sólo se pueden utilizar los símbolos permitidos en ese sistema.
Para indicar en qué sistema de numeración se representa una cantidad se añade como a la derecha el número de símbolos que se pueden representar en dicho sistema.
Teorema fundamental de la numeración Este teorema establece la forma general de construir números en un sistema de numeración posicional. Primero estableceremos unas definiciones básicas:
- , número válido en el sistema de numeración.
- , base del sistema de numeración. Número de símbolos permitidos en el sistema.
- , un símbolo cualquiera de los permitidos en el sistema de numeración.
- ,: número de dígitos de la parte entera.
- , coma fraccionaria. Símbolo utilizado para separar la parte entera de un número de su parte fraccionaria.
- ,: número de dígitos de la parte decimal.






La fórmula general para construir un número N, con un número finito de decimales, en un sistema de numeración posicional de base b es la siguiente:

El valor total del número será la suma de cada dígito multiplicado por la potencia de la base correspondiente a la posición que ocupa en el número.
Esta representación posibilita la realización de sencillos para la ejecución de operaciones
En el sistema decimal los símbolos válidos para construir números son {0,1,...9} (0 hasta 9, ambos incluidos), por tanto la base (el número de símbolos válidos en el sistema) es diez
En la figura inferior podemos ver el teorema fundamental de la numeración aplicado al sistema decimal.


Ejemplo en el sistema binario
Véase ahora el sistema binario o de base 2. En este sistema los dígitos válidos son {0,1}, y dos unidades forman una unidad de orden superior.
En la figura inferior puede verse el teorema fundamental de la numeración aplicado al sistema binario.


Siguiendo con el ejemplo del cuentakilómetros visto arriba, en este caso las ruedas no tienen 10 símbolos (0 al 9) como en el caso del sistema decimal. En el sistema binario la base es 2, lo que quiere decir que sólo existen 2 símbolos {0,1} para construir todos los números binarios.
En el sistema binario, para representar cifras mayores que 1 se combinan los 2 símbolos {0,1} y agrega una segunda columna de un orden superior.
Aquí las ruedas del cuentakilómetros dan una vuelta cada dos unidades. Por tanto, una vez que se cuenta (suma) dos se han agotado los símbolos disponibles para esa columna, y se deben poner a cero la columna y usar otra columna a la izquierda.
Así, contando en binario, tras el número viene el , pero si se cuenta una unidad más se debe usar otra columna, resultando .



Se sigue contando ,,,. Al añadir una unidad a la columna de las unidades, esa columna ha dado la vuelta (ha agotado los símbolos disponibles), y se debe formar una unidad de segundo orden, pero como ya hay una, también se agotan los símbolos disponibles para esa columna, y se deben formar una unidad de tercer orden o . Así, en el sistema binario .



Ejemplos:
- El número está formado por un solo símbolo repetido tres veces. No obstante, cada uno de esos símbolos tiene un valor diferente, que depende de la posición que ocupa en el número. Así, el primer 1 (empezando por la izquierda) representa un valor de , el segundo de y el tercero de , dando como resultado el valor del número: .





METODO DE HORNER
Aunque la solución de un polinomio para un valor específico de x es una tarea sencilla el algoritmo reduce la cantidad de operaciones necesarias para llegar al resultado lo que la convierte en una técnica más eficiente y más deseable a la hora de programarla.
Llamando a el grado del polinomio g una resolución por sustituciones requiere hasta (g2+g)/2 multiplicaciones y g sumas mientras que el algoritmo de Horner solo requerirá g sumas y g multiplicaciones.
Veremos la diferencia para el siguiente polinomio de grado 4 y valor de x:
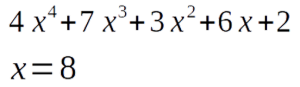
Resolución por sustitución
Esta resolución es la manera clásica donde se sustituye la x por el valor deseado y luego se realizan las operaciones necesaria
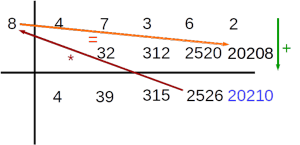
Colocamos los coeficientes del polinomio en una tabla junto con el valor de x que quiere evaluarse.
Bajamos el primer coeficiente y lo multiplicamos por el valor de x colocando el resultado debajo del siguiente coeficiente en la tabla.
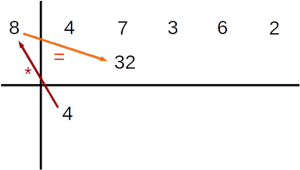
Sumamos los dos valores obteniendo un nuevo resultado parcial.
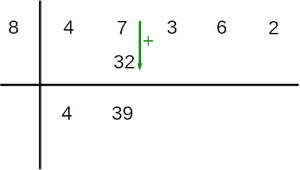
Repetimos la operación para cada coeficiente.
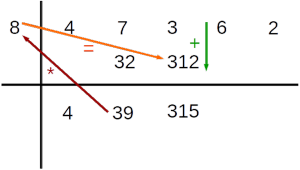
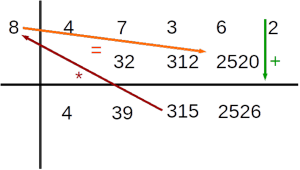
Al llegar al último coeficiente obtenemos el resultado final
Método de Horner – Algoritmo
El Teorema del residuo
Generalmente cuando un polinomio es dividido entre un binomio hay un residuo.
Considere la función polinomial f ( x ) = x 2 - 8 x + 6. Divida el polinomio entre el binomio x - 2.
Podemos realizar la división en cualquier método.
Método 1: División larga
 .
.
El residuo es -6.
Método 2: División sintética
El residuo es -6.
Ahora compare el residuo de -6 en f (2).

Dese cuenta que el valor de f (2) es el mismo que el residuo cuando el polinomio es dividido entre el binomio x - 2. Esto ilustra el teorema del residuo.
Si un polinomio f ( x ) es dividido entre x - a , el residuo es la constante f ( a ), y  , donde q ( x ) es un polinomio con un grado menor que el grado de f ( x ).
, donde q ( x ) es un polinomio con un grado menor que el grado de f ( x ).
, donde q ( x ) es un polinomio con un grado menor que el grado de f ( x ).
En otras palabras, el dividendo es igual al cociente por el divisor mas el residuo.
La división sintética es un proceso más sencillo para dividir un polinomio entre un binomio. Cuando es utilizada la división sintética para evaluar una función, es llamada la sustitución sintética.
TEOREMA DE RESIDUO
|
Una ecuación es una igualdad entre dos expresiones algebraicas en las que aparece una (o más) incógnita. Normalmente, la incógnita es x.
La incógnita x representa al número (o números), si existe, que hace que la igualdad sea verdadera. Este número desconocido es la solución de la ecuación.
Al cambiar la x por la solución, la igualdad debe ser cierta.
Ejemplo
x+2 = 2·x-1
- Si x es 0, la igualdad no se cumple porque 0+2 no es igual a 2·0-1.
- Si x es 3, la igualdad sí se cumple porque 3+2 es igual a 2·3-1.
La solución de la ecuación es x = 3.
Algunas cuestiones…
Algunas cuestiones que suelen hacerse los alumnos son las siguientes:
- ¿Todas las ecuaciones tienen solución?
- ¿Cuántas soluciones tiene una ecuación?
- ¿Cuántos tipos de ecuaciones hay?
- ¿Puede haber más de una incógnita?
Respuestas a las cuestiones:
- No todas las ecuaciones tienen solución. Por ejemplo, la ecuación x + 1 = x – 1 no tiene ninguna solución.
- Una ecuación puede tener 0 soluciones, 1 solución, 2 soluciones, 3 soluciones, etc. El número de ecuaciones depende del tipo de ecuación.
- Algunos tipos de ecuaciones son: ecuaciones lineales, ecuaciones cuadráticas, ecuaciones exponenciales, ecuaciones logarítmicas, ecuaciones irracionales, etc.
- Sí puede haber más de una incógnita en una ecuación, pero según el tipo de ecuación podremos o no resolverla.
Ejemplo
Tenemos que pasar las x‘s a un lado de la igualdad (izquierda, por ejemplo) y los números al otro lado (derecha).
En la derecha, la x está restando. Pasa a la izquierda sumando:
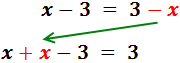
Sumamos los monomios x+x del lado izquierdo:
En la izquierda, el -3 está restando. Pasa a la derecha sumando:
Sumamos los monomios de la derecha:
Por tanto, la solución de la ecuación es x = 3.
Puede resultar de ayuda representar flechas mientras operamos en la ecuación.
Ejemplo 2
Sumamos (o restamos) los monomios con la misma parte literal (las x con x, los números con números). Los que están sumando en un lado, pasan al otro lado restando y viceversa.
Después pasamos las x a un lado de la igualdad y los números a la otra.
Recordamos que la forma general de una ecuación cuadrática o de segundo grado es
donde a ≠ 0 , b y c los coeficientes.
Por tanto, tenemos 3 tipos de ecuaciones incompletas:
Cada uno de estos tipos se resuelve de una forma distinta.
Primer tipo:
Si la ecuación es de la forma
despejamos la x pasando el término c y el coeficiente a al lado derecho:
Haciendo la raíz cuadrada, obtenemos las dos raíces:
Pero es necesario que el radicando (interior de la raíz) sea no negativo. Si no es así, no existen soluciones (reales).
Segundo tipo:
Si la ecuación es de la forma
Extraemos factor común de x:
Por tanto, las soluciones de la ecuación son
Es decir, x = 0 y x = -b/a.
Tercer tipo:
Si la ecuación es de la forma
Sólo hay una solución y es x = 0. Esto se debe a que el producto a·x 2 es 0 sólo cuando x = 0 porque a ≠ 0
FUNCIÓN
II PARCIAL
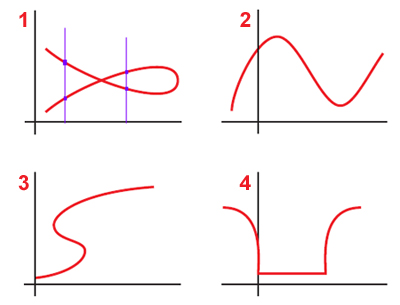
Veamos algunos ejemplos de funciones lineales y no lineales:
Cuando el valor de la pendiente (m) es igual a 0, nos encontramos ante un caso particular
de la función lineal, que tiene el nombre de funcion
Recuerda que, si se grafica una función lineal,
siempre se obtiene una recta. Veamos la gráfica de la
función y = 2x – 1.
Pendiente en la función lineal
Veamos ahora la relación que existe entre la pendiente y el
comportamiento de la función lineal.
Podemos apreciar que, de acuerdo al valor de la pendiente m, la función
lineal puede ser creciente(m>0), decreciente(m<0), constante (m=0).
También es importante recordar que la pendiente se puede calcular a partir de dos puntos de la recta:
Dominio y rango de la función lineal
En una función lineal el dominio y rango siempre son los mismos, el
conjunto de los números reales:
El único caso en que el rango no es el conjunto de los números reales,
es el caso particular de la función constante, en el que “y” asume un único
valor.
Ejemplo 1:
Calcular la pendiente de la recta 2y = 4x + 12
Solución:
Para obtener la pendiente «m», vamos a buscar la
forma y = mx + b. Para ello, el coeficiente de y, pasará a
dividir al segundo miembro:
A partir de esta igualdad, se obtiene el valor de
la pendiente: m = 2.
Ejemplo 2:
Encontrar la ecuación de la recta que pasa por los puntos A = (2;3) y B
= (6;5).
Solución:
Al ser una recta, sabemos que es la representación de una función
lineal. Dado que tenemos dos puntos, diremos que A será el punto 1, y B el
punto 2:
Primero, vamos a calcular la pendiente:
Ahora que ya tenemos el valor de la pendiente, reemplazamos en la
ecuación de la función lineal para encontrar el valor del punto de corte con el
eje y (b):
Tomamos cualquiera de los dos puntos, y reemplazamos en la expresión
anterior. Tomemos el punto A = (2;3), y reemplacemos los valores de “x” e “y”:
Ahora que conocemos el valor de la pendiente (m) y del punto de corte
con
el eje y (b), podemos dar la
respuesta
:
Función cuadrática
La forma general de una función cuadrática es f ( x ) =
ax 2 + bx + c . La gráfica de una función cuadrática es una de curva de 2 dimensiones.
La parábola "básica", y = x 2 , se ve así:
La función del coeficiente a en la ecuación
general es de hacer la parábola "más amplia" o "más
delgada", o de darle la vuelta (si es negativa):
Si el coeficiente de x 2 es positivo, la parábola abre hacia arriba; de otra forma abre hacia
abajo.
El vértice
El vértice de una parábola es el punto en la parte baja
de la forma "U" (o la superior, si la parábola abre hacia abajo).
La ecuación para una parábola también puede escribirse en la "forma
vértice":
y = a ( x – h ) 2 + k
En esta ecuación, el vértice de la parábola es el punto ( h , k ).
Puede ver como esto se relaciona a la ecuación estándar al
multiplicarla:
y = a ( x – h )( x – h )
+ k
y = ax 2 – 2 ahx + ah 2 + k
El coeficiente de x aquí es – 2 ah .
Esto significa que en la forma estándar, y = ax 2 + bx + c , la expresión
nos da la coordenada en x del vértice .

Ejemplo:
Encuentre el vértice de la parábola.
y = 3 x 2 + 12 x – 12
Aquí, a = 3 y b = 12. Así, la
coordenada en x del vértice es:
Sustituyendo en la ecuación original para obtener la coordenada en y ,
obtenemos:
y = 3(–2) 2 + 12(–2) – 12
= –24
Así, el vértice de la parábola esta en ( – 2, – 24).
El eje de simetría
El eje de simetría de una parábola es la recta vertical a través del
vértice. Para una parábola en la forma estándar, y = ax 2 + bx + c , el eje de simetría tiene la
ecuación
Dese cuenta que – b /2 a es
también la coordenada en x del vértice de la parábola.

Ejemplo:
Encuentre el eje de simetría.
y = 2 x 2 + x – 1
Aquí, a = 2 y b = 1. Así, el el eje de
simetría es la recta vertical
Intercepciones
Puede encontrar la intercepción en y de una parábola
simplemente al introducir 0 para x . Si la ecuación esta en la
forma estándar, entonces Usted solo toma a c como la
intercepción en y . Por ejemplo, en el ejemplo anterior:
y = 2(0) 2 + (0) – 1 = –1
Así la intercepción en y es – 1.
Las intercepciones en x son un poco más complicadas.
Puede usar la o la formula para encontrar estas (si es que
existen!).
Dominio y rango
Como con cualquier función, el dominio de función
cuadrática f ( x ) es el conjunto de los
valores de x para los cuales la función esta definida, y
el rango es el conjunto de todos los valores de salida
(valores de f ).
Las funciones cuadráticas generalmente tienen la recta real de enteros
como su dominio: cualquier x es una entrada legítima. El rango
esta restringido a esos puntos mayores que o iguales a la coordenada en y del
vértice (o menores que o iguales a, dependiendo si la parábola abre hacia
arriba o hacia abajo).

Función cúbica
Una función cúbica es una función polinomial de grado 3. Puede ser
escrita en la forma f ( x ) = ax 3 + bx 2 + cx +
d , donde a, b, c y d son números
reales y a ≠ 0.
También puede ser escrita como f ( x )
= a ( x + b ) 3 + c , donde a, b y c son
números reales y a ≠ 0.
Ejemplo
1:
Grafique la función f ( x ) =
–2( x + 1) 3 – 3
Ejemplo
2:
Grafique la función f ( x ) = x 3 – 6 x 2 + 12 x –
3
Una Una función cúbica (o función de tercer grado) es una función polinómica de grado 3, es decir, que el mayor exponente del polinomio es x elevado a 3 (x3):
La representación gráfica de la
función cúbica es:
Una función cúbica puede tener tres, dos o una raíz. Las raíces de una función son los elementos
del dominio tal que su imagen es nula (f(x) = 0).
Características
de la función cúbica
ANUNCIOS
Siendo f(x) = ax3+bx2+cx+d, entonces
tenemos que:
§ Dominio:
§ Codominio:
§ Derivada
de la función cúbica:
§ Integral
de la función cúbica, es:
o función de tercer grado) es una función polinómica de grado 3, es decir, que el mayor
exponente del polinomio es x elevado a 3 (x3):
La representación gráfica de la
función cúbica es:
Una función cúbica puede tener tres, dos o una raíz. Las raíces de una función son los elementos
del dominio tal que su imagen es nula (f(x) = 0).
Características
de la función cúbica
ANUNCIOS
Siendo f(x) = ax3+bx2+cx+d, entonces
tenemos que:
§ Dominio:
§ Codominio:
§ Derivada
de la función cúbica:
§ Integral
de la función cúbica, es:
Función afín
es una función polinómica de primer grado
que no pasa por el origen de coordenadas, o sea, por el punto (0,0).
Las funciones afines son rectas definidas por
la siguiente fórmula:
Los escalares m y n son diferentes
de 0.
La m es la pendiente de la recta. La
pendiente es la inclinación con respecto al eje de abscisas (eje X). Si m es positiva (m>0), entonces
la función es creciente. En cambio, si
la m es negativa (m<0), entonces
la función es decreciente.
La pendiente m significa que
si aumentamos la x en una unidad,
la y aumenta
en m unidades. Si
la m es positiva,
conforme aumentemos la x la y también irá
aumentando (función creciente). En cambio, si m es negativa,
conforme se aumenta la x la y disminuirá (función decreciente).
La ordenada en el origen es
la n, es decir, el punto
donde la recta corta el eje de ordenadas. Las coordenadas de este punto son (0,n).
Ejercicio 1
ANUNCIOS
Sea una función f(x) = 2x-2. En este caso, m que es el
coeficiente que multiplica a la x es m = 2 y la
ordenada es n = -2.
La función es afín porque tanto m
como n son diferentes de 0 (m ≠ 0
y n ≠ 0).
Como la ordenada es n = -2, la
recta corta al eje de ordenadas por el punto (0,-2).
Ejercicio 2
Ahora tenemos la función afín f(x) = –x+3. En este caso, la
pendiente es m = -1 y la
ordenada es n = 3,
siendo ambos diferentes de 0.
A diferencia del primer ejemplo, la pendiente es negativa (m = -1), por
lo que la función es decreciente.
La ordenada es n = 3, por
lo que el punto de corte entre la función y el eje de
ordenadas es el punto (0,3).
Funcion
En matemáticas, una
función f es una relación entre un conjunto dado X (el dominio) y otro conjunto
de elementos Y (el codominio) de forma que a cada elemento x del dominio le
corresponde un único elemento del codominio f(x). Se denota por:
Una primera idea de
función es la de una fórmula que relaciona algebraicamente varias magnitudes.
La representación gráfica mediante diagramas cartesianos permite la visualización de las funciones. De este modo, el concepto de función se generaliza a cualquier relación numérica que responda a una gráfica sobre unos ejes coordenados.
La representación gráfica mediante diagramas cartesianos permite la visualización de las funciones. De este modo, el concepto de función se generaliza a cualquier relación numérica que responda a una gráfica sobre unos ejes coordenados.
La expresión f(x)
indica el valor de la función f asociado al número x.
Las funciones describen fenómenos cotidianos, económicos, psicológicos, científicos... Tales funciones se obtienen experimentalmente, mediante observación.
Las funciones definidas a trozos, requieren de varias fórmulas, cada una de las cuales rige el comportamiento de la función en un cierto tramo.
Familias de funciones:
Las funciones describen fenómenos cotidianos, económicos, psicológicos, científicos... Tales funciones se obtienen experimentalmente, mediante observación.
Las funciones definidas a trozos, requieren de varias fórmulas, cada una de las cuales rige el comportamiento de la función en un cierto tramo.
Familias de funciones:
·
Lineales: f(x) = a*x + b;
·
Cuadráticas: f(x) = a*x^2 + b*x + c;
·
Funciones raiz: f(x) = sqrt(k*x)
·
Funciones de proporcionalidad inversa:
f(x) = k/x;
·
Funciones exponenciales: f(x) = a^x;
·
Funciones logarítmicas: f(x) = log(x);
·
Funciones trigonométricas: f(x) =
sin(x); f(x) = cos(x); f(x) = tan(x);
·
Funciones arco: f(x) = asin(x); f(x) =
acos(x); f(x) = atan(x);
Función lineal
Autor:
Tema:
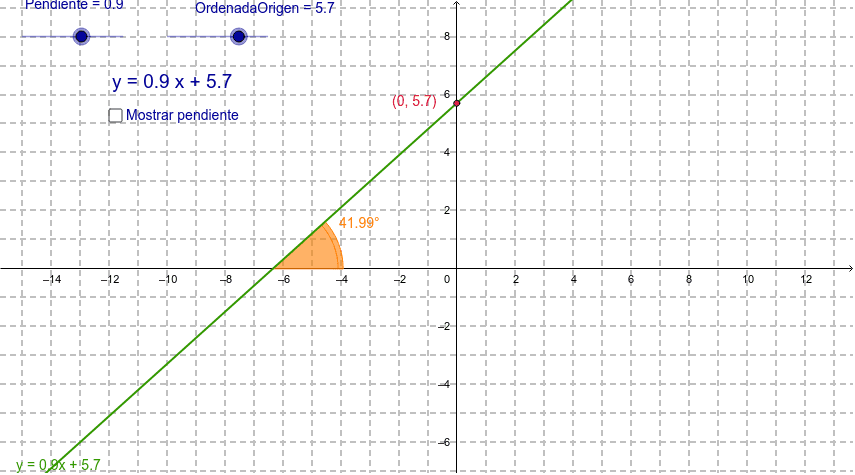
La
función lineal es una relación entre dos variables x e y. La variable x se
llama variable independiente y la variable y se llama dependiente, ya que su
valor depende del valor asignado a x. Su forma general es y=m * x + b, siendo m
su pendiente y b su ordenada al origen. La representación gráfica de toda
función lineal es una recta. a) Modifica el valor de la pendiente y observa qué
cambios se observan en su gráfica. b) Modifica el valor de la ordenada al
origen y observa qué cambios se observan en su gráfica.
Responde:
a) Cómo resulta la recta cuya pendiente es igual a 0?
b) Cómo resulta la recta cuya ordenada es
igual a 0?
c) Activa la casilla Mostrar Pendiente y
explica qué significado tiene en la gráfica.
Elementos de la función lineal
En la función lineal, que siempre tiene la
forma y = mx + b ; tenemos los siguientes elementos:
·
x: variable independiente.
·
y: variable dependiente (su valor
depende del valor de x).
·
m: pendiente.
·
b: corte con el eje y, u ordenada de
origen.
Veamos algunos ejemplos de funciones lineales y no lineales:
Cuando el valor de la pendiente (m) es igual a 0, nos encontramos ante un caso particular
de la función lineal, que tiene el nombre de función constante.
Recuerda que, si se grafica una función lineal,
siempre se obtiene una recta. Veamos la gráfica de la
función y = 2x – 1.
Pendiente en la función lineal
Veamos ahora la relación que existe entre la pendiente y el
comportamiento de la función lineal.
Podemos apreciar que, de acuerdo al valor de la pendiente m, la función
lineal puede ser creciente(m>0), decreciente(m<0), constante (m=0).
También es importante recordar que la pendiente se puede calcular a partir de dos puntos de la recta:
Dominio y rango de la función lineal
En una función lineal el dominio y rango siempre son los mismos, el
conjunto de los números reales:
El único caso en que el rango no es el conjunto de los números reales,
es el caso particular de la función constante, en el que “y” asume un único
valor.
Ejemplo 1:
Calcular la pendiente de la recta 2y = 4x + 12
Solución:
Para obtener la pendiente «m», vamos a buscar la
forma y = mx + b. Para ello, el coeficiente de y, pasará a
dividir al segundo miembro:
A partir de esta igualdad, se obtiene el valor de
la pendiente: m = 2.
Ejemplo 2:
Encontrar la ecuación de la recta que pasa por los puntos A = (2;3) y B
= (6;5).
Solución:
Al ser una recta, sabemos que es la representación de una función
lineal. Dado que tenemos dos puntos, diremos que A será el punto 1, y B el
punto 2:
Primero, vamos a calcular la pendiente:
Ahora que ya tenemos el valor de la pendiente, reemplazamos en la
ecuación de la función lineal para encontrar el valor del punto de corte con el
eje y (b):
Tomamos cualquiera de los dos puntos, y reemplazamos en la expresión
anterior. Tomemos el punto A = (2;3), y reemplacemos los valores de “x” e “y”:
Ahora que conocemos el valor de la pendiente (m) y del punto de corte
con
el eje y (b), podemos dar la
respuesta
Función cuadrática
La forma general de una función cuadrática es f ( x ) =
ax 2 + bx + c . La gráfica de una función cuadrática es una parábola , un tipo de curva de 2 dimensiones.
La parábola "básica", y = x 2 , se ve así:
La función del coeficiente a en la ecuación
general es de hacer la parábola "más amplia" o "más
delgada", o de darle la vuelta (si es negativa):
Si el coeficiente de x 2 es positivo, la parábola abre hacia arriba; de otra forma abre hacia
abajo.
El vértice
El vértice de una parábola es el punto en la parte baja
de la forma "U" (o la superior, si la parábola abre hacia abajo).
La ecuación para una parábola también puede escribirse en la "forma
vértice":
y = a ( x – h ) 2 + k
En esta ecuación, el vértice de la parábola es el punto ( h , k ).
Puede ver como esto se relaciona a la ecuación estándar al
multiplicarla:
y = a ( x – h )( x – h )
+ k
y = ax 2 – 2 ahx + ah 2 + k
El coeficiente de x aquí es – 2 ah .
Esto significa que en la forma estándar, y = ax 2 + bx + c , la expresión
nos da la coordenada en x del vértice .
Ejemplo:
Encuentre el vértice de la parábola.
y = 3 x 2 + 12 x – 12
Aquí, a = 3 y b = 12. Así, la
coordenada en x del vértice es:
Sustituyendo en la ecuación original para obtener la coordenada en y ,
obtenemos:
y = 3(–2) 2 + 12(–2) – 12
= –24
Así, el vértice de la parábola esta en ( – 2, – 24).
El eje de simetría
El eje de simetría de una parábola es la recta vertical a través del
vértice. Para una parábola en la forma estándar, y = ax 2 + bx + c , el eje de simetría tiene la
ecuación
Dese cuenta que – b /2 a es
también la coordenada en x del vértice de la parábola.
Ejemplo:
Encuentre el eje de simetría.
y = 2 x 2 + x – 1
Aquí, a = 2 y b = 1. Así, el el eje de
simetría es la recta vertical
Intercepciones
Puede encontrar la intercepción en y de una parábola
simplemente al introducir 0 para x . Si la ecuación esta en la
forma estándar, entonces Usted solo toma a c como la
intercepción en y . Por ejemplo, en el ejemplo anterior:
y = 2(0) 2 + (0) – 1 = –1
Así la intercepción en y es – 1.
Las intercepciones en x son un poco más complicadas.
Puede usar la factorización , o completar el
cuadrado , o la fórmula
cuadrática para encontrar estas (si es que
existen!).
Dominio y rango
Como con cualquier función, el dominio de función
cuadrática f ( x ) es el conjunto de los
valores de x para los cuales la función esta definida, y
el rango es el conjunto de todos los valores de salida
(valores de f ).
Las funciones cuadráticas generalmente tienen la recta real de enteros
como su dominio: cualquier x es una entrada legítima. El rango
esta restringido a esos puntos mayores que o iguales a la coordenada en y del
vértice (o menores que o iguales a, dependiendo si la parábola abre hacia
arriba o hacia abajo).
Función cúbica
Una función cúbica es una función polinomial de grado 3. Puede ser
escrita en la forma f ( x ) = ax 3 + bx 2 + cx +
d , donde a, b, c y d son números
reales y a ≠ 0.
También puede ser escrita como f ( x )
= a ( x + b ) 3 + c , donde a, b y c son
números reales y a ≠ 0.
Ejemplo
1:
Grafique la función f ( x ) =
–2( x + 1) 3 – 3
Ejemplo
2:
Grafique la función f ( x ) = x 3 – 6 x 2 + 12 x –
3
Una Una función cúbica (o función de tercer grado) es
una función
polinómica de grado 3, es decir, que el mayor exponente del polinomio
es x elevado a 3 (x3):
La representación gráfica de la
función cúbica es:
Una función cúbica puede tener tres, dos o una raíz. Las raíces de una función son los elementos
del dominio tal que su imagen es nula (f(x) = 0).
Características
de la función cúbica
ANUNCIOS
Siendo f(x) = ax3+bx2+cx+d, entonces
tenemos que:
§ Dominio:
§ Codominio:
§ Derivada
de la función cúbica:
§ Integral
de la función cúbica, es:
o función de tercer grado) es una función polinómica de grado 3, es decir, que el mayor
exponente del polinomio es x elevado a 3 (x3):
La representación gráfica de la
función cúbica es:
Una función cúbica puede tener tres, dos o una raíz. Las raíces de una función son los elementos
del dominio tal que su imagen es nula (f(x) = 0).
Características
de la función cúbica
ANUNCIOS
Siendo f(x) = ax3+bx2+cx+d, entonces
tenemos que:
§ Dominio:
§ Codominio:
§ Derivada
de la función cúbica:
§ Integral
de la función cúbica, es:
Función afín
es una función polinómica de primer grado
que no pasa por el origen de coordenadas, o sea, por el punto (0,0).
Las funciones afines son rectas definidas por
la siguiente fórmula:
Los escalares m y n son diferentes
de 0.
La m es la pendiente de la recta. La
pendiente es la inclinación con respecto al eje de abscisas (eje X). Si m es positiva (m>0), entonces
la función es creciente. En cambio, si
la m es negativa (m<0), entonces
la función es decreciente.
La pendiente m significa que
si aumentamos la x en una unidad,
la y aumenta
en m unidades. Si
la m es positiva,
conforme aumentemos la x la y también irá
aumentando (función creciente). En cambio, si m es negativa,
conforme se aumenta la x la y disminuirá (función decreciente).
La ordenada en el origen es
la n, es decir, el punto
donde la recta corta el eje de ordenadas. Las coordenadas de este punto son (0,n).
Ejercicio 1
ANUNCIOS
Sea una función f(x) = 2x-2. En este caso, m que es el
coeficiente que multiplica a la x es m = 2 y la
ordenada es n = -2.
La función es afín porque tanto m
como n son diferentes de 0 (m ≠ 0
y n ≠ 0).
Como la ordenada es n = -2, la
recta corta al eje de ordenadas por el punto (0,-2).
Ejercicio 2
Ahora tenemos la función afín f(x) = –x+3. En este caso, la
pendiente es m = -1 y la
ordenada es n = 3,
siendo ambos diferentes de 0.
A diferencia del primer ejemplo, la pendiente es negativa (m = -1), por
lo que la función es decreciente.
La ordenada es n = 3, por
lo que el punto de corte entre la función y el eje de
ordenadas es el punto (0,3).
III PARCIAL
Un vector se representa mediante un segmento de recta, orientado dentro del espacio euclidiano tridimensional. El vector tiene 3 elementos: módulo, dirección y sentido.2 Los vectores nos permiten representar magnitudes físicas vectoriales, como las mencionadas líneas abajo.
En matemáticas se define vector como un elemento de un espacio vectorial. Esta noción es más abstracta y para muchos espacios vectoriales no es posible representar sus vectores mediante el módulo y la dirección. En particular los espacios de dimensión infinita sin producto escalar no son representables de ese modo. Los vectores en un espacio euclídeo se pueden representar geométricamente como segmentos de recta , en el plano (bidimensional), o en el espacio (tridimensional).



Algunos ejemplos de magnitudes físicas que son magnitudes vectoriales: la velocidad con que se desplaza un móvil, ya que no queda definida tan solo por su módulo que es lo que marca el velocímetro, en el caso de un automóvil, sino que se requiere indicar la dirección (hacia donde se dirige), la fuerza que actúa sobre un objeto, ya que su efecto depende además de su magnitud o módulo, de la dirección en la que actúa; también, el desplazamiento de un objeto, pues es necesario definir el punto inicial y final del movimiento.
Definición

Se llama vector de dimensión a una tupla de números reales (que se llaman componentes del vector). El conjunto de todos los vectores de dimensión se representa como (formado mediante el producto cartesiano).

Así, un vector perteneciente a un espacio se representa como:

, donde


Un vector también se puede ver desde el punto de vista de la geometría como vector geométrico (usando frecuentemente el espacio tridimensional o bidimensional ).
Un vector fijo del plano euclídeo es un segmento orientado, en el que hay que distinguir tres características:345
- Módulo: la longitud del segmento expresado en términos de un valor numérico y una unidad.
- Dirección: el ángulo del vector con respecto al eje x.
- Sentido: la orientación del segmento, del origen al extremo del vector. Puede ser positivo o negativo.
En inglés, la palabra direction indica tanto la dirección como el sentido del vector, con lo que se define el vector con solo dos características: módulo y dirección.6
Los vectores fijos del plano se denotan con dos letras mayúsculas (y una flecha hacia la derecha encima), por ejemplo , que indican su origen y extremo respectivamente. Es decir, el punto A es el origen o punto de aplicación y el punto B es el extremo del vector , cuyas coordenadas son:


Características de un vector

Un vector se puede definir por sus coordenadas, si el vector está en el plano xy, se representa:

siendo sus coordenadas:

Si consideramos el triángulo formado por los componentes (como catetos) y (como hipotenusa): se puede calcular multiplicando por el cosα (siendo α el ángulo formado por y ) o multiplicando por el senβ (siendo β el ángulo formado por y ). De igual forma se puede calcular multiplicando por el senα o multiplicando por el cosβ (considerando las posiciones de α y β mencionadas anteriormente).




Siendo el vector la suma vectorial de sus coordenadas:


Si un vector es de tres dimensiones reales, representado sobre los ejes x, y, z, se puede representar:

siendo sus coordenadas:

Si representamos el vector gráficamente podemos diferenciar los siguientes elementos:
La recta soporte o dirección, sobre la que se traza el vector.

El módulo o amplitud con una longitud proporcional al valor del vector.

El sentido, indicado por la punta de flecha, siendo uno de los dos posibles sobre la recta soporte.

El punto de aplicación que corresponde al lugar geométrico al cual corresponde la característica vectorial representado por el vector.

El nombre o denominación es la letra, signo o secuencia de signos que define al vector.

Por lo tanto en un vector podemos diferenciar:

- Nombre
- Dirección
- Sentido
- Módulo
- Punto de aplicación
Magnitudes vectoriales


Frente a aquellas magnitudes físicas, tales como la masa, la presión, el volumen, la energía, la temperatura, etc; que quedan completamente definidas por un número y las unidades utilizadas en su medida, aparecen otras, tales como el desplazamiento, la velocidad, la aceleración, la fuerza, el campo eléctrico, etc., que no quedan completamente definidas dando un dato numérico, sino que llevan asociadas una dirección. Estas últimas magnitudes son llamadas vectoriales en contraposición a las primeras llamadas escalares.
Las magnitudes vectoriales quedan representadas por un ente matemático que recibe el nombre de vector. En un espacio euclidiano, de no más de tres dimensiones, un vector se representa por un segmento orientado. Así, un vector queda caracterizado por los siguientes elementos: su longitud o módulo, siempre positivo por definición, y su dirección, la cual puede ser representada mediante la suma de sus componentes vectoriales ortogonales, paralelas a los ejes de coordenadas; o mediante coordenadas polares, que determinan el ángulo que forma el vector con los ejes positivos de coordenadas.78
Se representa como un segmento orientado, con una dirección, dibujado de forma similar a una "flecha". Su longitud representa el módulo del vector, la recta indica la dirección, y la "punta de flecha" indica su sentido.345
Notación
Las magnitudes vectoriales se representan en los textos impresos por letras en negrita, para diferenciarlas de las magnitudes escalares que se representan en cursiva. En los textos manuscritos, las magnitudes vectoriales se representan colocando una flecha sobre la letra que designa su módulo (el cual es un escalar).
- Ejemplos
- ... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de una magnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector: ...
- En los textos manuscritos se escribe: ... para los vectores y ... o ... para los módulos.





Cuando convenga, se representan la magnitud vectorial haciendo referencia al origen y al extremo del segmento orientado que la representa geométricamente; así, se designan los vectores representados en la Figura 2 en la forma , ... resultando muy útil esta notación para los vectores que representan el desplazamiento.

Además de estas convenciones los vectores unitarios o versores, cuyo módulo es la unidad, se representan frecuentemente con un circunflejo encima, por ejemplo .

Clasificación de vectores
Según los criterios que se utilicen para determinar la igualdad o equipolencia de dos vectores, pueden distinguirse distintos tipos de los mismos:
- Vectores libres: no están aplicados en ningún punto en particular.
- Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.
- Vectores fijos o ligados: están aplicados en un punto en particular.
Podemos referirnos también a:
- Vectores unitarios: vectores de módulo unidad.
- Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto. También se les suele llamar angulares porque forman un ángulo entre ellas.
- Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios.3 En inglés se dice que son de igual magnitud pero direcciones contrarias, ya que la dirección también indica el sentido.
- Vectores colineales: los vectores que comparten una misma recta de acción.
- Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.
- Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
Componentes de un vector

Un vector en el espacio euclídeo tridimensional se puede expresar como una combinación lineal de tres vectores unitarios o versores, que son perpendiculares entre sí y constituyen una base vectorial.
En coordenadas cartesianas, los vectores unitarios se representan por , , , paralelos a los ejes de coordenadas , , positivos. Los componentes del vector en una base vectorial predeterminada pueden escribirse entre paréntesis y separadas con comas:






o expresarse como una combinación de los vectores unitarios definidos en la base vectorial. Así, en un sistema de coordenadas cartesiano, será

Estas representaciones son equivalentes entre sí, y los valores , , , son los componentes de un vector que, salvo que se indique lo contrario, son números reales.



Una representación conveniente de las magnitudes vectoriales es mediante un vector columna o un vector fila, particularmente cuando están implicadas operaciones matrices (tales como el cambio de base), del modo siguiente:
![{\mathbf {a}}={\begin{bmatrix}a_{x}\\a_{y}\\a_{z}\\\end{bmatrix}}\qquad {\mathbf {a}}=[a_{x}\ a_{y}\ a_{z}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/74dd5bf24782a78879c23ed46b4f08fdc7e16421)
Con esta notación, los vectores cartesianos quedan expresados de la siguiente manera:
![{{\mathbf i}}=[1\ 0\ 0],\ {{\mathbf j}}=[0\ 1\ 0],\ {{\mathbf k}}=[0\ 0\ 1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/07c3a1a35a66b5e4b06fe445b3fba02953572873)
El lema de Zorn, consecuencia del axioma de elección, permite establecer que todo espacio vectorial admite una base vectorial, por lo que todo vector es representable como el producto de unos componentes respecto a dicha base. Dado un vector solo existen un número finito de componentes diferentes de cero.
Representación gráfica de los vectores
Hay personas que no recomienda usar gráficos para evitar la confusión de conceptos y la inducción al error, sin investigación que lo corrobore, también es cierto que la memoria se estimula con mejores resultados. Para ello:
- Se llama vector a la representación visual con el símbolo de flecha (un segmento y un triángulo en un extremo).
- La rectitud visual de una flecha o curvatura de la misma, no la hace diferente en símbolo si los dos extremos permanecen en el mismo lugar y orden.
- El que una flecha cierre en sí misma, indica la ausencia de efectos algebraicos.
- Para visualizar la suma de vectores se hará encadenándolos, es decir, uniendo el extremo que tiene un triángulo (final) del primer vector con el extremo que no lo tiene (origen) del segundo vector manteniendo la dirección y distancia, propias al espacio, de sus dos extremos, ya que estas dos cualidades los distingue visualmente de otros vectores.
- Los escalares se representarán con una línea de trazos a modo, exclusivamente, de distinción ya que no siempre pertenecen al espacio de vectores.
Se examinan cada uno de los casos que aparecen en la definición de las operaciones suma de vectores y producto por un escalar:
Suma de vectores
La definición suma de vectores en el orden u+v produce otro vector, es como encadenar, siempre visualmente, un vector u y luego uno v. Diremos que u+v se simplifica como un vector w o que w descompone como suma de vectores u y v.

- 1) Decir que u+v=v+u, es exigir que las dos sumas simplifiquen en el mismo vector, en negro. Véase que en física los vectores en rojo simulan la descomposición de fuerzas ejercidas por el vector negro en su origen, y se representa con un paralelogramo.

- 2) Decir que u+(v+w)=(u+v)+w, es exigir que las simplificaciones de sumas de vectores puedan ser optativas en cualquier cadena de sumas.

- 3) Decir que existe un vector cero (elemento neutro) tal que u+0=u, equivale a exigir que exista un vector incapaz de efectuar, mediante la suma, modificación alguna a todos los vectores.

- 4) Decir que u+(-u)=0, es exigir la existencia de un elemento opuesto, -u, que sumado a u simplifique en un vector cero.

Producto por un escalar
La definición producto por un escalar produce otro vector; es como modificar el extremo final del vector u, siempre visualmente.

Por un lado la representación del producto en el caso que el cuerpo de los escalares sea modifica, visualmente, la longitud de la imagen del vector, quedando ambos siempre superpuestos; por otro lado las representaciones en el caso que además de modificar la longitud, también agrega rotaciones, para facilitarlas visualmente considérense centradas en el origen del vector, siendo estas modificaciones un poco más expresivas, visualmente, pero no más fáciles que en el caso real:



- a)Decir que a(bu)=(ab)u, es exigir que los productos encadenados a(b(u)) pueden simplificarse como uno, c=ab, luego (ab)u queda como cu.

- b) Decir que existe el escalar 1 tal que 1u=u, equivale a decir exista un escalar incapaz de efectuar, mediante producto, modificación alguna a todos los vectores.

- c) Decir que a(u+v)=au+av, es exigir la propiedad distributiva respecto la suma vectorial.

- d) Decir que (a+b)u=au+bu, es exigir la propiedad distributiva respecto la suma escalar.

Para el caso real se han de eliminar las rotaciones de los ejemplos anteriores.
Operaciones con vectores
Suma de vectores
Para sumar dos vectores libres (vector y vector) se escogen como representantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector.
Suma de vectores sobre un mismo punto
La suma de vectores está bien definida si ambos vectores pertenecen al mismo espacio vectorial, en física para que dos vectores puedan ser sumados deben estar aplicados en el mismo punto. La composición de fuerzas sobre un sólido rígido cuando los puntos de aplicación no coinciden lleva a la noción de momento de fuerza dados dos fuerzas con puntos de aplicación se definen la fuerza resultante como el par:[cita requerida]



Donde es la suma generalizada a vectores aplicados en diferentes puntos. El punto de aplicación es el punto de intersección de las rectas de acción de las fuerzas. Los componentes del vector de fuerza resultante es de hecho la suma de componentes ordinarias de vectores:



El momento resultante es el momento de fuerza del conjunto de fuerzas respecto al punto calculado para la fuerza resultante.
Método del paralelogramo

Este método permite solamente sumar vectores de dos en dos. Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en un punto, trazando rectas paralelas a cada uno de los vectores, en el extremo del otro y de igual longitud, formando así un paralelogramo (ver gráfico). El vector resultado de la suma es la diagonal de dicho paralelogramo que parte del origen común de ambos vectores.
Método del triángulo o método poligonal

Consiste en disponer gráficamente un vector a continuación de otro, ordenadamente: el origen de cada uno de los vectores coincidirá con el extremo del siguiente. El vector resultante es aquel cuyo origen coincide con el del primer vector y termina en el extremo del último.
Método analítico para la suma y diferencia de vectores
Dados dos vectores libres,


El resultado de su suma o de su diferencia se expresa en la forma

y ordenando los componentes,

Con la notación matricial sería

Conocidos los módulos de dos vectores dados, y , así como el ángulo que forman entre sí, el módulo de es:





La deducción de esta expresión puede consultarse en deducción del módulo de la suma.
Producto de un vector por un escalar

El producto de un vector por un escalar es otro vector cuyo módulo es el producto del escalar por el módulo del vector, cuya dirección es igual a la del vector, y cuyo sentido es contrario a este si el escalar es negativo.
Partiendo de la representación gráfica del vector, sobre la misma línea de su dirección tomamos tantas veces el módulo de vector como indica el escalar.
Sean un escalar y un vector, el producto de por se representa y se realiza multiplicando cada una de los componentes del vector por el escalar; esto es,



Con la notación matricial sería

Producto escalar
Producto vectorial
Derivada ordinaria de un vector
Dado un vector que es función de una variable independiente

Calculamos la derivada ordinaria del vector con respecto de la variable t, calculando la derivada de cada una de sus componentes como si de escalares se tratara:

teniendo en cuenta que los vectores unitarios son constantes en módulo y dirección.
Con notación matricial sería



Veamos un ejemplo de derivación de un vector, partiendo de una función vectorial:
Esta función representa una curva helicoidal alrededor del eje z, de radio unidad, como se ilustra en la figura. Podemos imaginar que esta curva es la trayectoria de una partícula y la función representa el vector posición en función del tiempo t. Derivando tendremos:


Realizando la derivada:

La derivada del vector posición respecto al tiempo es la velocidad, así que esta segunda función determina el vector velocidad de la partícula en función del tiempo, podemos escribir:

Este vector velocidad es un vector tangente a la trayectoria en el punto ocupado por la partícula en cada instante. El sentido es hacia los valores crecientes de los valores escalares.6 Si derivásemos de nuevo obtendríamos el vector aceleración.
Derivada covariante de un vector
Cuando en lugar de emplear una "base fija" en todo el dominio de un vector se usan "bases móviles" como cuando se emplean coordenadas curvilíneas la variación total de un vector dependiente del tiempo depende no solo de la variación de componentes como en el caso de la derivada ordinaria sino también de la variación de la orientación de la base. La variación total se llama derivada covariante:

Cuando se emplea una base fija (coordenadas cartesianas) la derivada covariante coincide con la derivada ordinaria. Por ejemplo cuando se estudia el movimiento de una partícula desde un sistema de referencia no inercial en rotación, las aceleraciones de Coriolis y centrípeta se deben a los factores que contienen y otros factores menos comunes.

Ángulo entre dos vectores[editar]
El ángulo determinado por las direcciones de dos vectores y viene dado por:

Descomposiciones de un vector
Dado un vector y una dirección de referencia dada por un vector unitario se puede descomponer el primer vector en un componente paralela y otro componente perpendicular a la dirección de referencia:


En física esta descomposición se usa en diferentes contextos como descomponer la aceleración en un componente paralela a la velocidad y otro componente perpendicular a la misma. También el tensión mecánica en un punto sobre un plano puede descomponerse en un componente normal al plano y otra paralela.
También dado un campo vectorial definido sobre un dominio de Lipschitz, acotado, simplemente conexo y de cuadrado integrable admite la llamada descomposición de Helmholtz como suma de un campo conservativo y un campo solenoidal:



Cambio de base vectorial[editar]

En matemáticas las rotaciones son transformaciones lineales que conservan las normas en espacios vectoriales en los que se ha definido una operación de producto interior. La matriz de transformación tiene la propiedad de ser una matriz unitaria, es decir, es ortogonal y su determinante es 1. Sea un vector expresado en un sistema de coordenadas cartesianas (x, y, z) con una base vectorial asociada definida por los versores ; esto es,




Ahora, supongamos que giramos el sistema de ejes coordenados, manteniendo fijo el origen del mismo, de modo que obtengamos un nuevo triedro ortogonal de ejes (x′, y′, z′), con una base vectorial asociada definida por los versores . Los componentes del vector en esta nueva base vectorial serán:




La operación de rotación de la base vectorial siempre puede expresarse como la acción de un operador lineal (representado por una matriz) actuando sobre el vector (multiplicando al vector):

que es la matriz de transformación para el cambio de base vectorial.

- Ejemplo
En el caso simple en el que el giro tenga magnitud alrededor del eje z, tendremos la transformación:


Al hacer la aplicación del operador, es decir, al multiplicar la matriz por el vector, obtendremos la expresión del vector en la nueva base vectorial:

siendo



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
los componentes del vector en la nueva base vectorial.
Definición[editar]
Se llama vector de dimensión a una tupla de números reales (que se llaman componentes del vector). El conjunto de todos los vectores de dimensión se representa como (formado mediante el producto cartesiano).
Así, un vector perteneciente a un espacio se representa como:
, donde
Un vector también se puede ver desde el punto de vista de la geometría como vector geométrico (usando frecuentemente el espacio tridimensional o bidimensional ).
Un vector fijo del plano euclídeo es un segmento orientado, en el que hay que distinguir tres características:345
- Módulo: la longitud del segmento expresado en términos de un valor numérico y una unidad.
- Dirección: el ángulo del vector con respecto al eje x.
- Sentido: la orientación del segmento, del origen al extremo del vector. Puede ser positivo o negativo.
En inglés, la palabra direction indica tanto la dirección como el sentido del vector, con lo que se define el vector con solo dos características: módulo y dirección.6
Los vectores fijos del plano se denotan con dos letras mayúsculas (y una flecha hacia la derecha encima), por ejemplo , que indican su origen y extremo respectivamente. Es decir, el punto A es el origen o punto de aplicación y el punto B es el extremo del vector , cuyas coordenadas son:
Características de un vector[editar]
Un vector se puede definir por sus coordenadas, si el vector está en el plano xy, se representa:
siendo sus coordenadas:
Si consideramos el triángulo formado por los componentes (como catetos) y (como hipotenusa): se puede calcular multiplicando por el cosα (siendo α el ángulo formado por y ) o multiplicando por el senβ (siendo β el ángulo formado por y ). De igual forma se puede calcular multiplicando por el senα o multiplicando por el cosβ (considerando las posiciones de α y β mencionadas anteriormente).
Siendo el vector la suma vectorial de sus coordenadas:
Si un vector es de tres dimensiones reales, representado sobre los ejes x, y, z, se puede representar:
siendo sus coordenadas:
Si representamos el vector gráficamente podemos diferenciar los siguientes elementos:
La recta soporte o dirección, sobre la que se traza el vector.
El módulo o amplitud con una longitud proporcional al valor del vector.
El sentido, indicado por la punta de flecha, siendo uno de los dos posibles sobre la recta soporte.
El punto de aplicación que corresponde al lugar geométrico al cual corresponde la característica vectorial representado por el vector.
El nombre o denominación es la letra, signo o secuencia de signos que define al vector.
Por lo tanto en un vector podemos diferenciar:
- Nombre
- Dirección
- Sentido
- Módulo
- Punto de aplicación
Magnitudes vectoriales[editar]
Frente a aquellas magnitudes físicas, tales como la masa, la presión, el volumen, la energía, la temperatura, etc; que quedan completamente definidas por un número y las unidades utilizadas en su medida, aparecen otras, tales como el desplazamiento, la velocidad, la aceleración, la fuerza, el campo eléctrico, etc., que no quedan completamente definidas dando un dato numérico, sino que llevan asociadas una dirección. Estas últimas magnitudes son llamadas vectoriales en contraposición a las primeras llamadas escalares.
Las magnitudes vectoriales quedan representadas por un ente matemático que recibe el nombre de vector. En un espacio euclidiano, de no más de tres dimensiones, un vector se representa por un segmento orientado. Así, un vector queda caracterizado por los siguientes elementos: su longitud o módulo, siempre positivo por definición, y su dirección, la cual puede ser representada mediante la suma de sus componentes vectoriales ortogonales, paralelas a los ejes de coordenadas; o mediante coordenadas polares, que determinan el ángulo que forma el vector con los ejes positivos de coordenadas.78
Se representa como un segmento orientado, con una dirección, dibujado de forma similar a una "flecha". Su longitud representa el módulo del vector, la recta indica la dirección, y la "punta de flecha" indica su sentido.345
Notación[editar]
Las magnitudes vectoriales se representan en los textos impresos por letras en negrita, para diferenciarlas de las magnitudes escalares que se representan en cursiva. En los textos manuscritos, las magnitudes vectoriales se representan colocando una flecha sobre la letra que designa su módulo (el cual es un escalar).
- Ejemplos
- ... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de una magnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector: ...
- En los textos manuscritos se escribe: ... para los vectores y ... o ... para los módulos.
Cuando convenga, se representan la magnitud vectorial haciendo referencia al origen y al extremo del segmento orientado que la representa geométricamente; así, se designan los vectores representados en la Figura 2 en la forma , ... resultando muy útil esta notación para los vectores que representan el desplazamiento.
Además de estas convenciones los vectores unitarios o versores, cuyo módulo es la unidad, se representan frecuentemente con un circunflejo encima, por ejemplo .
Clasificación de vectores[editar]
Según los criterios que se utilicen para determinar la igualdad o equipolencia de dos vectores, pueden distinguirse distintos tipos de los mismos:
- Vectores libres: no están aplicados en ningún punto en particular.
- Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.
- Vectores fijos o ligados: están aplicados en un punto en particular.
Podemos referirnos también a:
- Vectores unitarios: vectores de módulo unidad.
- Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto. También se les suele llamar angulares porque forman un ángulo entre ellas.
- Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios.3 En inglés se dice que son de igual magnitud pero direcciones contrarias, ya que la dirección también indica el sentido.
- Vectores colineales: los vectores que comparten una misma recta de acción.
- Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.
- Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
Componentes de un vector[editar]
Un vector en el espacio euclídeo tridimensional se puede expresar como una combinación lineal de tres vectores unitarios o versores, que son perpendiculares entre sí y constituyen una base vectorial.
En coordenadas cartesianas, los vectores unitarios se representan por , , , paralelos a los ejes de coordenadas , , positivos. Los componentes del vector en una base vectorial predeterminada pueden escribirse entre paréntesis y separadas con comas:
o expresarse como una combinación de los vectores unitarios definidos en la base vectorial. Así, en un sistema de coordenadas cartesiano, será
Estas representaciones son equivalentes entre sí, y los valores , , , son los componentes de un vector que, salvo que se indique lo contrario, son números reales.
Una representación conveniente de las magnitudes vectoriales es mediante un vector columna o un vector fila, particularmente cuando están implicadas operaciones matrices (tales como el cambio de base), del modo siguiente:
Con esta notación, los vectores cartesianos quedan expresados de la siguiente manera:
El lema de Zorn, consecuencia del axioma de elección, permite establecer que todo espacio vectorial admite una base vectorial, por lo que todo vector es representable como el producto de unos componentes respecto a dicha base. Dado un vector solo existen un número finito de componentes diferentes de cero.
Representación gráfica de los vectores[editar]
Hay personas que no recomienda usar gráficos para evitar la confusión de conceptos y la inducción al error, sin investigación que lo corrobore, también es cierto que la memoria se estimula con mejores resultados. Para ello:
- Se llama vector a la representación visual con el símbolo de flecha (un segmento y un triángulo en un extremo).
- La rectitud visual de una flecha o curvatura de la misma, no la hace diferente en símbolo si los dos extremos permanecen en el mismo lugar y orden.
- El que una flecha cierre en sí misma, indica la ausencia de efectos algebraicos.
- Para visualizar la suma de vectores se hará encadenándolos, es decir, uniendo el extremo que tiene un triángulo (final) del primer vector con el extremo que no lo tiene (origen) del segundo vector manteniendo la dirección y distancia, propias al espacio, de sus dos extremos, ya que estas dos cualidades los distingue visualmente de otros vectores.
- Los escalares se representarán con una línea de trazos a modo, exclusivamente, de distinción ya que no siempre pertenecen al espacio de vectores.
Se examinan cada uno de los casos que aparecen en la definición de las operaciones suma de vectores y producto por un escalar:
Suma de vectores[editar]
La definición suma de vectores en el orden u+v produce otro vector, es como encadenar, siempre visualmente, un vector u y luego uno v. Diremos que u+v se simplifica como un vector w o que w descompone como suma de vectores u y v.
- 1) Decir que u+v=v+u, es exigir que las dos sumas simplifiquen en el mismo vector, en negro. Véase que en física los vectores en rojo simulan la descomposición de fuerzas ejercidas por el vector negro en su origen, y se representa con un paralelogramo.
- 2) Decir que u+(v+w)=(u+v)+w, es exigir que las simplificaciones de sumas de vectores puedan ser optativas en cualquier cadena de sumas.
- 3) Decir que existe un vector cero (elemento neutro) tal que u+0=u, equivale a exigir que exista un vector incapaz de efectuar, mediante la suma, modificación alguna a todos los vectores.
- 4) Decir que u+(-u)=0, es exigir la existencia de un elemento opuesto, -u, que sumado a u simplifique en un vector cero.
Producto por un escalar[editar]
La definición producto por un escalar produce otro vector; es como modificar el extremo final del vector u, siempre visualmente.
Por un lado la representación del producto en el caso que el cuerpo de los escalares sea modifica, visualmente, la longitud de la imagen del vector, quedando ambos siempre superpuestos; por otro lado las representaciones en el caso que además de modificar la longitud, también agrega rotaciones, para facilitarlas visualmente considérense centradas en el origen del vector, siendo estas modificaciones un poco más expresivas, visualmente, pero no más fáciles que en el caso real:
- a)Decir que a(bu)=(ab)u, es exigir que los productos encadenados a(b(u)) pueden simplificarse como uno, c=ab, luego (ab)u queda como cu.
- b) Decir que existe el escalar 1 tal que 1u=u, equivale a decir exista un escalar incapaz de efectuar, mediante producto, modificación alguna a todos los vectores.
- c) Decir que a(u+v)=au+av, es exigir la propiedad distributiva respecto la suma vectorial.
- d) Decir que (a+b)u=au+bu, es exigir la propiedad distributiva respecto la suma escalar.
Para el caso real se han de eliminar las rotaciones de los ejemplos anteriores.
Operaciones con vectores[editar]
Suma de vectores[editar]
Para sumar dos vectores libres (vector y vector) se escogen como representantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector.
Suma de vectores sobre un mismo punto[editar]
La suma de vectores está bien definida si ambos vectores pertenecen al mismo espacio vectorial, en física para que dos vectores puedan ser sumados deben estar aplicados en el mismo punto. La composición de fuerzas sobre un sólido rígido cuando los puntos de aplicación no coinciden lleva a la noción de momento de fuerza dados dos fuerzas con puntos de aplicación se definen la fuerza resultante como el par:[cita requerida]
Donde es la suma generalizada a vectores aplicados en diferentes puntos. El punto de aplicación es el punto de intersección de las rectas de acción de las fuerzas. Los componentes del vector de fuerza resultante es de hecho la suma de componentes ordinarias de vectores:
El momento resultante es el momento de fuerza del conjunto de fuerzas respecto al punto calculado para la fuerza resultante.
Método del paralelogramo[editar]
Este método permite solamente sumar vectores de dos en dos. Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en un punto, trazando rectas paralelas a cada uno de los vectores, en el extremo del otro y de igual longitud, formando así un paralelogramo (ver gráfico). El vector resultado de la suma es la diagonal de dicho paralelogramo que parte del origen común de ambos vectores.
Método del triángulo o método poligonal[editar]
Consiste en disponer gráficamente un vector a continuación de otro, ordenadamente: el origen de cada uno de los vectores coincidirá con el extremo del siguiente. El vector resultante es aquel cuyo origen coincide con el del primer vector y termina en el extremo del último.
Método analítico para la suma y diferencia de vectores[editar]
Dados dos vectores libres,
El resultado de su suma o de su diferencia se expresa en la forma
y ordenando los componentes,
Con la notación matricial sería
Conocidos los módulos de dos vectores dados, y , así como el ángulo que forman entre sí, el módulo de es:
La deducción de esta expresión puede consultarse en deducción del módulo de la suma.
Producto de un vector por un escalar[editar]
El producto de un vector por un escalar es otro vector cuyo módulo es el producto del escalar por el módulo del vector, cuya dirección es igual a la del vector, y cuyo sentido es contrario a este si el escalar es negativo.
Partiendo de la representación gráfica del vector, sobre la misma línea de su dirección tomamos tantas veces el módulo de vector como indica el escalar.
Sean un escalar y un vector, el producto de por se representa y se realiza multiplicando cada una de los componentes del vector por el escalar; esto es,
Con la notación matricial sería
Producto escalar[editar]
Producto vectorial[editar]
Derivada ordinaria de un vector[editar]
Dado un vector que es función de una variable independiente
Calculamos la derivada ordinaria del vector con respecto de la variable t, calculando la derivada de cada una de sus componentes como si de escalares se tratara:
teniendo en cuenta que los vectores unitarios son constantes en módulo y dirección.
Con notación matricial sería
Veamos un ejemplo de derivación de un vector, partiendo de una función vectorial:
Esta función representa una curva helicoidal alrededor del eje z, de radio unidad, como se ilustra en la figura. Podemos imaginar que esta curva es la trayectoria de una partícula y la función representa el vector posición en función del tiempo t. Derivando tendremos:
Realizando la derivada:
La derivada del vector posición respecto al tiempo es la velocidad, así que esta segunda función determina el vector velocidad de la partícula en función del tiempo, podemos escribir:
Este vector velocidad es un vector tangente a la trayectoria en el punto ocupado por la partícula en cada instante. El sentido es hacia los valores crecientes de los valores escalares.6 Si derivásemos de nuevo obtendríamos el vector aceleración.
Derivada covariante de un vector[editar]
Cuando en lugar de emplear una "base fija" en todo el dominio de un vector se usan "bases móviles" como cuando se emplean coordenadas curvilíneas la variación total de un vector dependiente del tiempo depende no solo de la variación de componentes como en el caso de la derivada ordinaria sino también de la variación de la orientación de la base. La variación total se llama derivada covariante:
Cuando se emplea una base fija (coordenadas cartesianas) la derivada covariante coincide con la derivada ordinaria. Por ejemplo cuando se estudia el movimiento de una partícula desde un sistema de referencia no inercial en rotación, las aceleraciones de Coriolis y centrípeta se deben a los factores que contienen y otros factores menos comunes.
Ángulo entre dos vectores[editar]
El ángulo determinado por las direcciones de dos vectores y viene dado por:
Descomposiciones de un vector[editar]
Dado un vector y una dirección de referencia dada por un vector unitario se puede descomponer el primer vector en un componente paralela y otro componente perpendicular a la dirección de referencia:
En física esta descomposición se usa en diferentes contextos como descomponer la aceleración en un componente paralela a la velocidad y otro componente perpendicular a la misma. También el tensión mecánica en un punto sobre un plano puede descomponerse en un componente normal al plano y otra paralela.
También dado un campo vectorial definido sobre un dominio de Lipschitz, acotado, simplemente conexo y de cuadrado integrable admite la llamada descomposición de Helmholtz como suma de un campo conservativo y un campo solenoidal:
Cambio de base vectorial[editar]
En matemáticas las rotaciones son transformaciones lineales que conservan las normas en espacios vectoriales en los que se ha definido una operación de producto interior. La matriz de transformación tiene la propiedad de ser una matriz unitaria, es decir, es ortogonal y su determinante es 1. Sea un vector expresado en un sistema de coordenadas cartesianas (x, y, z) con una base vectorial asociada definida por los versores ; esto es,
Ahora, supongamos que giramos el sistema de ejes coordenados, manteniendo fijo el origen del mismo, de modo que obtengamos un nuevo triedro ortogonal de ejes (x′, y′, z′), con una base vectorial asociada definida por los versores . Los componentes del vector en esta nueva base vectorial serán:
La operación de rotación de la base vectorial siempre puede expresarse como la acción de un operador lineal (representado por una matriz) actuando sobre el vector (multiplicando al vector):
que es la matriz de transformación para el cambio de base vectorial.
- Ejemplo
En el caso simple en el que el giro tenga magnitud alrededor del eje z, tendremos la transformación:
Al hacer la aplicación del operador, es decir, al multiplicar la matriz por el vector, obtendremos la expresión del vector en la nueva base vectorial:
siendo
los componentes del vector en la nueva base vectorial.
https://www.youtube.com/watch?v=IrTeyyzerjI
No hay comentarios.:
Publicar un comentario